1.spi概述
SPI是串行外设接口(Serial Peripheral Interface)的缩写。是 Motorola 公司推出的一种同步串行接口技术,是一种高速的,全双工,同步的通信总线。
2、SPI优点
支持全双工通信(SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出)
数据传输速率块
3、缺点
没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据可靠性上有一定的缺陷。
4、特点
1):高速、同步、全双工、非差分、总线式
2):主从机通信模式
2.硬体框架
SPI协议,硬件框架如下:
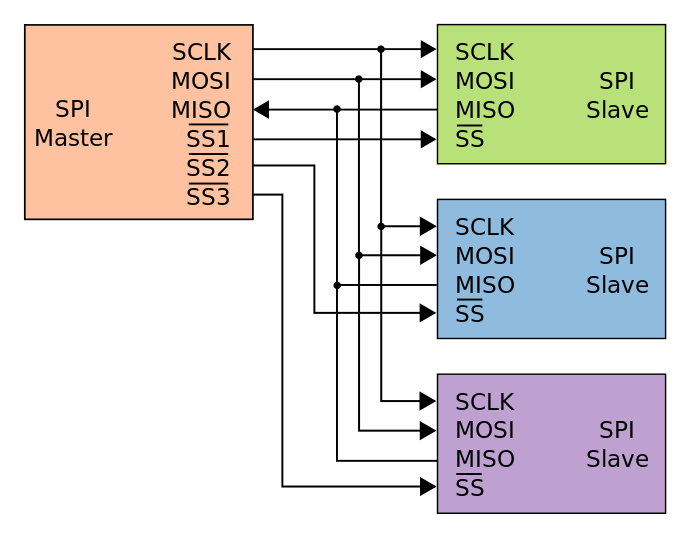
SCK:提供时钟
DO:作为数据输出
DI:作为数据输入
CS0/CS1:作为片选
同一时刻只能有一个SPI设备处于工作状态。因此cs选中谁,谁就和主控通信。
2.数据传输时序

这里是一款SPI flash在SCLK上升延采样数据(D7~D0)的示意图。设现在2440传输一个0x56数据给SPI Flash,时序如下:
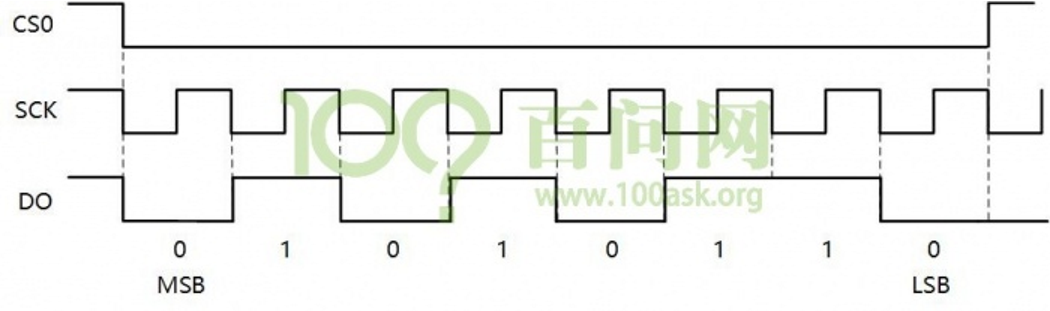
CS0低选中SPI Flash,配置成模式0, 0x56的二进制就是0b0101 0110,因此在每个SCK时钟周期,DO输出对应的电平。会在每个时钟周期的上升沿采样DO上的电平。
SPI相关的缩写或说法
CKPOL (Clock Polarity)(时钟)极性
CKPHA (Clock Phase)(时钟)相位
SCK=SCLK=SPI的时钟
Leading edge=前一个边沿
Trailing edge=后一个边沿
3.时钟极性相位模式
CPOL:表示SPI CLK的初始电平,0为电平,1为高电平
CPHA:表示相位,即第一个还是第二个时钟沿采样数据,0为第一个时钟沿,1为第二个时钟沿
|
SPI模式 |
CPOL |
CPHA |
空闲状态时钟极性 |
采样/移位时钟相位 |
|
0 |
0 |
0 |
低电平 |
上升沿采样(锁存)下降沿移位 |
|
1 |
0 |
1 |
低电平 |
上升沿移位下降沿采样(锁存) |
|
2 |
1 |
0 |
高电平 |
上升沿移位下降沿采样(锁存) |
|
3 |
1 |
1 |
高电平 |
上升沿采样(锁存)下降沿移位 |
4个模式波形对比:
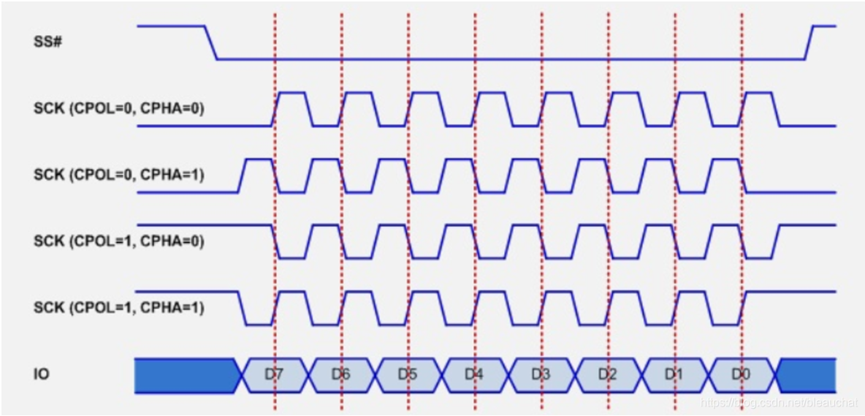
常用的是模式0和模式3,因为它们都是在上升沿采样数据.当配置成模式3时,对于主设备,数据采样在时钟上升沿,数据传送在时钟下降沿。
主设备SPI时钟和极性的配置应该由外设来决定;二者的配置应该保持一致,即主设备的SDO同从设备的SDO配置一致,主设备的SDI同从设备的SDI配置一致。即因为主从设备是在SCLK的控制下,同时发送和接收数据,并通过2个双向移位寄存器来交换数据 。
4.SPI控制器工作原理
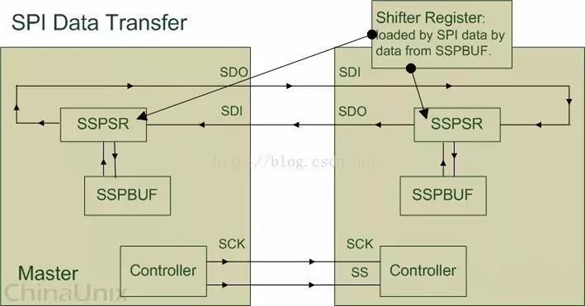
SSPSR
SSPSR:移位寄存器(Shift Register). 根据 SPI 时钟同步信号, 将SSPBUF中的数据一位一位移出去或者收进来。
SSPBUF
Master 与 Slave 之间交换的数据其实都是移位寄存器从 SSPBUF 里面拷贝的。通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的 SSPBUF.
Controller
用来发送控制信号的,像CS,SCK等控制信号。