现在你已经明白如何整合测量, 如何整合运动,完成了一维卡尔曼滤波,不过在现实中我们经常遇到多维的情况。
这就涉及到很多因素,举例,并说明为什么在较多纬度状态空间中估测很重要。
假设你有一个x和y的二维空间-比如一幅摄像头图像,或者在我们的例子中 我们可能采用一辆载有雷达的汽车来检测
车辆随着时间变化的位置,这时候二维卡尔曼滤波就非常适合。
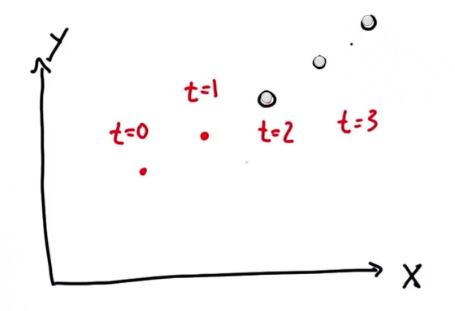
具体工作原理是这样的,假设在时间t=0时 你观察到感兴趣的对象将位于这个坐标
这可能是谷歌无人驾驶车项目的另一辆车。一段时间后 你会看到它在这里,t=1,在过一段时间,在t=2处。
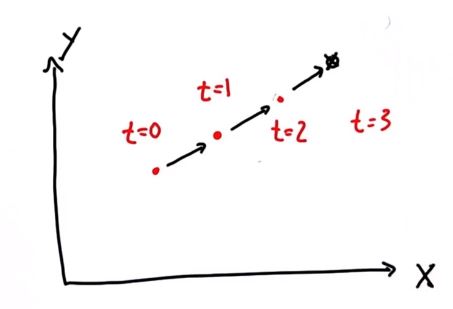
t=3时 在哪?
当你进行估算并且计算高纬度空间时 卡尔曼滤波器不仅能帮你进入x和y 空间,还能让你明确的弄清楚对象的速度是多少?
然后根据速度估计对未来做出很好的预测,现在请注意传感器本身只能看到位置,他无法看到实际速度,速度是从看到多个位置推断的,因此在跟踪应用程序中,卡尔曼滤波器最令人惊奇的功能之一是即使他没有直接测量,他也能得出对象的速度
然后根据速度预测出该速度出现的未来位置。这就是卡尔曼滤波器在人工智能和控制理论方面成为流行的原因。
卡尔曼滤波器后续
现在,你已经部署了一个一维卡尔曼滤波器,并且对多维卡尔曼滤波器的工作原理有了一些直观的认识。
但是,如果要在二维或三维世界(或者机器人学术语中的“状态空间”)中实际制造(甚至使用)卡尔曼滤波器,我们首先需要更深入地了解“状态”这个词的意思。
不过你无需担心,我们很快就会回到多维卡尔曼滤波器的相关课程!