运动规划的根本问题在于机器人可能存在于一个这样的世界中,
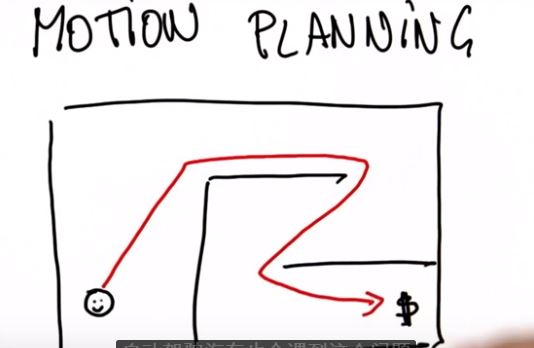
它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划,
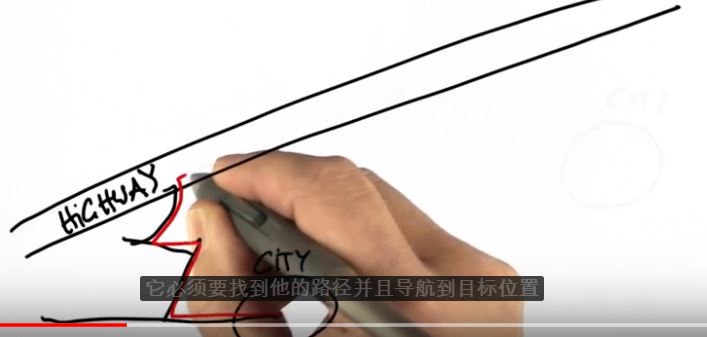
自动驾驶汽车也会遇到这个问题。他可能处于高速公路的附近的街道网络中,他必须要找到他的路径并导航到目标位置。
如果我们放大并且看看这个十字路口,这是我们渲染出来的最好的街道线环境。

从start出发顺着箭头直行,右转,直行,到达十字路口,现在在这里变换车道是一个冒险的方案
因为左边车道有一辆大卡车占道,一个可行的方案是在十字路直行绕着这个街区走。
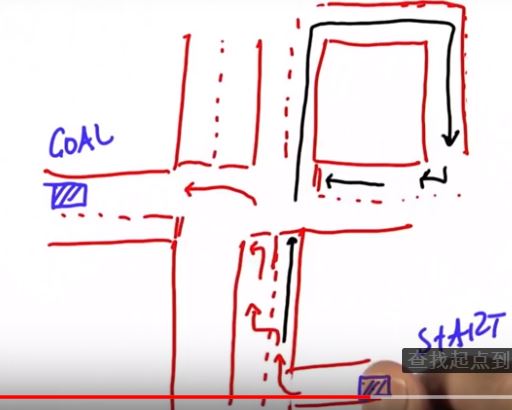
然后直道走到目标位置,查找起到到终点路径的过程称为规划,对机器人而言,常称为机器人运动规划,
今天我们将谈谈关于规划的离散方法。在哪里世界是分割成小块的。下一节课我们将谈谈使用这些方法
进行连续运动。
什么是规划问题?我们有一个世界地图,我们有一个起点和一个终点,通常我们会得到一种成本函数,
考虑成本的最简单方式是按照莫个路线行驶需要消耗的时间,我们的目标是找到最小成本路径。
