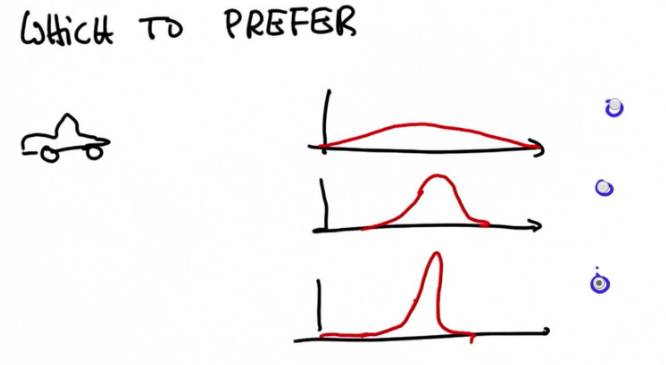
卡尔曼滤波——5.首先高斯分布 如果我们用无人驾驶汽车追踪另一輛汽车,应该选择那一个高斯分布? 应该选择第三个,因为这个高斯函数的确定性更高。正因如此他与另一輛车碰撞的几率减到最小。 因为知道更多有关这辆车的信息。