注意:本文含有一些数学公式,如果chrome不能看见公式的话请用IE打开网站
1.特征点提取
特征点提取有以下几个步骤:
a.尺度空间金字塔结构的构造

和SIFT类似,尺度空间金字塔是由不同的尺度构成,相互连续的两个尺度之间由Octave构成. 我们令t表示尺度,它们之间的计算关系如下:
图像的大小为(width, height),举个例子:
width, height scale1-octave1
(2/3)width, (2/3)height scale1-octave2
(1/2)width, (1/2)height scale2-octave1
(1/3)width, (1/3)height scale2-octave2
(1/4)width, (1/4)height scale3-octave1
(1/6)width, (1/6)height scale3-octave2
其中 由
由 下采样得到. 不同octave之间的采样关系为2/3,不同尺度之间的采样关系为1/2. 关于构造的代码:
下采样得到. 不同octave之间的采样关系为2/3,不同尺度之间的采样关系为1/2. 关于构造的代码:
void BriskScaleSpace::constructPyramid(const cv::Mat& image){ // set correct size: pyramid_.clear(); // fill the pyramid: pyramid_.push_back(BriskLayer(image.clone())); if(layers_>1){ pyramid_.push_back(BriskLayer(pyramid_.back(),BriskLayer::CommonParams::TWOTHIRDSAMPLE)); } const int octaves2=layers_; for(uint8_t i=2; i<octaves2; i+=2){ pyramid_.push_back(BriskLayer(pyramid_[i-2],BriskLayer::CommonParams::HALFSAMPLE)); pyramid_.push_back(BriskLayer(pyramid_[i-1],BriskLayer::CommonParams::HALFSAMPLE)); } }
b.通过阈值选取合适的关键点
关键点检测是通过FAST的算法进行的. FAST和AGAST在特征点检测中提供不同的模板。BRISK算法大部分使用FAST9-16提取特征点。首先,FAST9-16应用于每一个octave和每一层intra-octave,取相同的阈值T来分辨潜在的兴趣区域。然后,对兴趣区域中的点进行非极大值抑制:
1,问题点需要满足最大值条件,就是在同层中八邻域中的FAST score s最大。s定义为最大阈值是考虑到此点是图像角点。
2,同层和上下层的scores 应该都比此点的score s 小。检查等大小的方形patch内部:边长选择2像素。既然相邻层是不同离散化的,就需要在patch边缘进行插值。
3.由于确定一个特征点需要除本层以外的上下两层,但c0层是最底层,故需虚拟有一个d-1层,但这层不使用FAST9-16,而使用FAST5-8
非极大值抑制的代码:
1 __inline__ bool BriskScaleSpace::isMax2D(const uint8_t layer, 2 const int x_layer, const int y_layer){ 3 const cv::Mat& scores = pyramid_[layer].scores(); 4 const int scorescols = scores.cols; 5 uchar* data=scores.data + y_layer*scorescols + x_layer; 6 // decision tree: 7 const uchar center = (*data); 8 data--; 9 const uchar s_10=*data; //1 10 if(center<s_10) return false; 11 data+=2; 12 const uchar s10=*data; //2 13 if(center<s10) return false; 14 data-=(scorescols+1); 15 const uchar s0_1=*data; //3 16 if(center<s0_1) return false; 17 data+=2*scorescols; 18 const uchar s01=*data; //4 19 if(center<s01) return false; 20 data--; 21 const uchar s_11=*data; //5 22 if(center<s_11) return false; 23 data+=2; 24 const uchar s11=*data; //6 25 if(center<s11) return false; 26 data-=2*scorescols; 27 const uchar s1_1=*data; //7 28 if(center<s1_1) return false; 29 data-=2; 30 const uchar s_1_1=*data;//8 31 if(center<s_1_1) return false; 32 33 /*8 3 7 34 1 0 2 35 5 4 6*/ 36 37 // reject neighbor maxima 38 std::vector<int> delta; 39 // put together a list of 2d-offsets to where the maximum is also reached 40 if(center==s_1_1) { //8 41 delta.push_back(-1); 42 delta.push_back(-1); 43 } 44 if(center==s0_1) { //3 45 delta.push_back(0); 46 delta.push_back(-1); 47 } 48 if(center==s1_1) { //7 49 delta.push_back(1); 50 delta.push_back(-1); 51 } 52 if(center==s_10) { //1 53 delta.push_back(-1); 54 delta.push_back(0); 55 } 56 if(center==s10) { //2 57 delta.push_back(1); 58 delta.push_back(0); 59 } 60 if(center==s_11) { //5 61 delta.push_back(-1); 62 delta.push_back(1); 63 } 64 if(center==s01) { //4 65 delta.push_back(0); 66 delta.push_back(1); 67 } 68 if(center==s11) { //6 69 delta.push_back(1); 70 delta.push_back(1); 71 } 72 const unsigned int deltasize=delta.size(); 73 if(deltasize!=0){ 74 // in this case, we have to analyze the situation more carefully: 75 // the values are gaussian blurred and then we really decide 76 data=scores.data + y_layer*scorescols + x_layer; 77 int smoothedcenter=4*center+2*(s_10+s10+s0_1+s01)+s_1_1+s1_1+s_11+s11; 78 for(unsigned int i=0; i<deltasize;i+=2){ 79 //这里把左上角作为中心点进行平滑不知道是何意? 80 data=scores.data + (y_layer-1+delta[i+1])*scorescols + x_layer+delta[i]-1; 81 int othercenter=*data; 82 data++; 83 othercenter+=2*(*data); 84 data++; 85 othercenter+=*data; 86 data+=scorescols; 87 othercenter+=2*(*data); 88 data--; 89 othercenter+=4*(*data); 90 data--; 91 othercenter+=2*(*data); 92 data+=scorescols; 93 othercenter+=*data; 94 data++; 95 othercenter+=2*(*data); 96 data++; 97 othercenter+=*data; 98 if(othercenter>smoothedcenter) return false; 99 } 100 } 101 return true; 102 }
c.去除不符合条件的关键点
2.特征点描述
和SIFT类似,尺度空间金字塔是由不同的尺度构成,相互连续的两个尺度之间由Octave构成. 我们令t表示尺度,它们之间的计算关系如下:
其中由下采样得到. 不同octave之间的采样关系为2/3,不同尺度之间的采样关系为1/2.
b.通过阈值选取合适的关键点
关键点检测是通过FAST的算法进行的. FAST和AGAST在特征点检测中提供不同的模板。BRISK算法大部分使用FAST9-16提取特征点。首先,FAST9-16应用于每一个octave和每一层intra-octave,取相同的阈值T来分辨潜在的兴趣区域。然后,对兴趣区域中的点进行非极大值抑制:
1,问题点需要满足最大值条件,就是在同层中八邻域中的FAST score s最大。s定义为最大阈值是考虑到此点是图像角点。
2,同层和上下层的scores 应该都比此点的score s 小。检查等大小的方形patch内部:边长选择2像素。既然相邻层是不同离散化的,就需要在patch边缘进行插值。
3.由于确定一个特征点需要除本层以外的上下两层,但c0层是最底层,故需虚拟有一个d-1层,但这层不使用FAST9-16,而使用FAST5-8
c.去除不符合条件的关键点
2.特征点描述
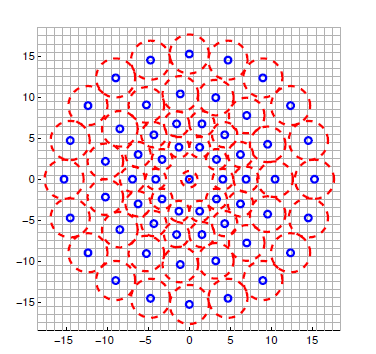
BRISK算法在每个模式设置了60个点。
小的蓝色的圆表示在patch中的采样位置;大的红色虚线圆半径为  对应于用来平滑采样点亮度的高斯核的标准差。上图是尺度t=1的模式.
对应于用来平滑采样点亮度的高斯核的标准差。上图是尺度t=1的模式.
为了避免混叠效果,我们对在模式中的采样点Pi应用了高斯平滑. 标准差 正比于每个采样点对应于各自中心的距离.
正比于每个采样点对应于各自中心的距离.
然后对60个点两两选取组成点对。一共是(60-1)*60/2个点对。 计算局部梯度:
所有点对的集合为:
阈值距离的选取:
迭代整个L上的点对,这样就可以估计出关键点k模式方向的整体特征:
长距离的点对都参与了运算,基于本地梯度互相抵消的假说,所以全局梯度的计算是不必要的。这一点同时也被距离变量阈值 的实验确认了
的实验确认了
3.创建描述子
对于旋转和尺度归一化的描述子的建立,BRISK使用了关键点周围的抽样点旋转 角度作为模式。和BRIEF类似,BIRSK的描述子也是一个包含512个比特位的向量,每个描述子由短距离点对
角度作为模式。和BRIEF类似,BIRSK的描述子也是一个包含512个比特位的向量,每个描述子由短距离点对 两两进行比较产生的,上标alpha表示旋转的模式。
两两进行比较产生的,上标alpha表示旋转的模式。
与BRIEF不同的地方是,BRIEF只是进行亮度比较,除了预设尺度和预先对样本模式的旋转之外,BRISK和BRIEF有着根本的区别:
a.BRISK使用固定的样本模式点,而且是以R为半径围绕关键点周围的圆进行均匀取样。因此特定的高斯核平滑不会突然地扭曲亮度内容的信息(模糊邻近的两个采样点的亮度,从而保证亮度平滑过渡)b.与两两组成的点对相比,BRISK显著的减少了采样点的数量(例如,单个的样本点参与了更多的比较),限制了亮度查找表的复杂度
c.这里的比较是受到空间的限制的,所以亮度的改变仅仅只是需要局部一致性就可以了。
程序中用到的算法:
二次曲线的标准公式如下:
给定数据:
令 函数在
函数在 的理论值,然后有:
的理论值,然后有: 
根据最小二乘定理,当下列偏导数等于0时使得S最小.
用方程组的形式表示出来:
这里有个比较疑惑的地方, refine1D, refine1D_1, refine1D_2这三个函数的矩阵是选取什么样的尺度初值算出来的?有知道朋友可以说说。
2.least square二次曲面拟合的参数计算
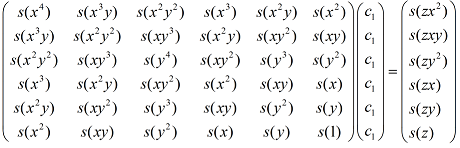
二次曲面的标准公式如下:
这里 ,选择C使得平方误差最小:
,选择C使得平方误差最小:
当梯度E为0向量的时候上式取得最小值。
也可以写成含有6个未知变量的6个方程组的形式:
6x6的矩阵
6x1向量
所以AC=B.
单个元素的例子:
3.平滑函数
曲面拟合采用的是线性曲面拟合
注意,程序中的积分路线是45度角度路径进行积分的。

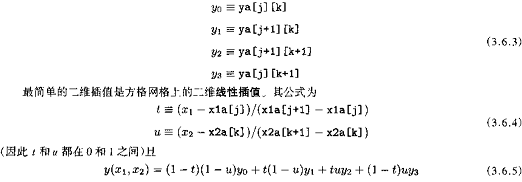
4.曲面插值
smoothedIntensity,BriskLayer::value这两个函数中使用了曲面插值算法。

5.重采样
重采样使用SSE指令对采样进行加速。
reference:
1.<Curve Fitting and Solution of Equation>
2.<Least Squares Fitting of Data> David Eberly