特征图(或者叫地标图,landmark maps)利用参数化特征(如点和线)的全局位置来表示环境。如图1所示,机器人的外部环境被一些列参数化的特征,即二维坐标点表示。这些静态的地标点被观测器(装有传感器的机器人)利用多目标跟踪的方法跟踪,从而估计机器人的运动。
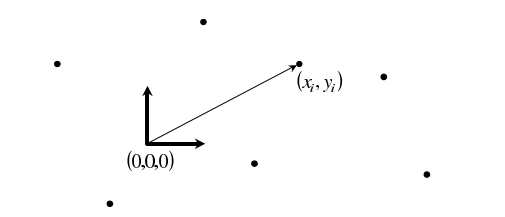
Fig.1 Feature maps.
机器人的定位是通过建立传感器观测特征和图map中特征之间的关系来确定的。预测特征的位置和量测特征位置之间的差别被用来计算机器人的位姿。这种方式,类似于多目标跟踪问题,但是不想传统的多目标跟踪问题,这里的目标群是静止的,但是观测的机器人是运动的。
先验特征图里面的地标位置被假设已知的,因此每个特征都很容易被一个参数集表示。假设机器人的量测,即从环境中提取的特征被正确地关联到图中的已有特征,我们就可以利用标准的估计技术如EKF来跟踪机器人的位姿。因此,数据关联(data association)是基于特征图的定位实现的主要弱点。
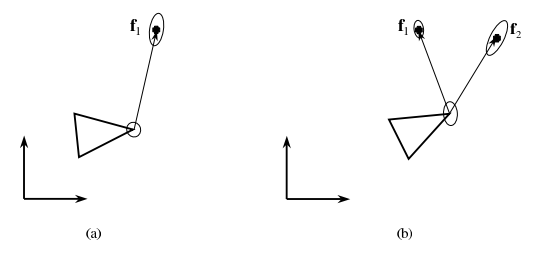
Fig.2 SLAM中不确定性的相关性分析
基于特征图的SLAM包含两个主要任务,首先需要将机器人上传感器新观测到的特征添加到Map中,新特征的添加是基于此时机器人位姿作为参考的;另一个任务是利用Map中现有的特征来估计机器人的位姿。传感器测量的不确定性将会导致机器人位姿和观测特征定位的确定,这些不确定性是相互依赖或者说相互关联的。如图2所示,在(a)中,机器人观测到f1,并初始化f1,因此该特征的定位便依赖于此时机器人的位姿。在下一个时刻(b),机器人再次观测到f1,并初始化新特征f2。因此,新特征f2的初始化便依赖于该时刻机器人的位姿估计,在初始化新特征的同时,机器人位姿的估计将反过来依赖于已观测特征f1。
下一节,我们将介绍基于Feature maps的随机SLAM算法。