理论
图像阈值分割 利用图像中 要提取的目标区域 与 其背景 在 灰度特性 上的差异,把图像看作 具有不同灰度级的两类区域 (目标区域和背景区域)的组合。
选取一个比较合理的阈值,以确定图像中每个像素点 应该属于目标区域 还是背景区域,从而产生相应的二值图像。
阈值分割法的特点是:适用于 目标与背景灰度 有较强对比 的情况,重要的是背景或物体的 灰度比较单一,而且总可以得到封闭 且 连通区域 的边界。
threshold 方法
threshold(src, thresh, maxval, type[, dst]) -> retval, dst
src:原始图像;
thresh:阈值,在 0--255 之间;如 127;
maxval:最大可能值,最大为 255;
type:二值化操作类型;方法类型,怎么样判断阈值,判断后怎么处理
- cv2.THRESH_TOZERO_INV
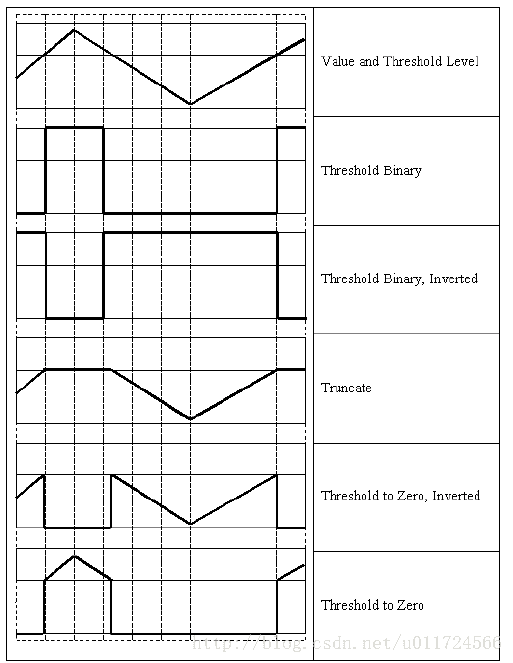
- cv2.THRESH_BINARY 超过阈值部分取 maxval (最大值), 否则取0
- cv2.THRESH_BINARY_INV, THRESH_BINARY的反转
- cV2.THRESH_TRUNC, 大于阈值部分设为阈值,否则不变;如阈值设置为 127,大于 127的,设置为 127
- cv2.THRESH_TOZERO, 大于阈值部分不改变,否则设为0
- cv2.THRESH_TOZERO_INV,THRESH_TOZERO的反转
INV 这个代表反转(inverse),在很多地方都会用到
下图做了一个形象的总结:
调用示例
import cv2
import matplotlib.pyplot as plt
# 读取为灰度图
img_gray=cv2.imread('dj.jpg',cv2.IMREAD_GRAYSCALE)
ret, thresh1 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY)
ret, thresh2 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY_INV)
ret, thresh3 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TRUNC)
ret, thresh4 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO)
ret, thresh5 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO_INV)
titles = [' Original ' , 'BINARY', 'BINARY_INV', ' TRUNC', 'TOZERO', 'TOZERO_INV']
images = [img_gray, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6) :
plt.subplot(2, 3, i + 1),
plt.imshow(images[i], 'gray' )
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
## 彩色图像的遍历
img = cv2.imread('lena.jpg')
h,w,n = img.shape
img2 = img.copy()
for i in range(h):
for j in range(w):
img2[i,j][1] = 0
cv_show(img2)