引言:
目前在图像识别方面的自动化测试框架有很多,其中比较有名的是airtest,主要做手机端的游戏自动化测试(http://airtest.netease.com/)
因为没有实际把airtest运用在项目中的经验,所以此篇文章暂不讨论,等后续有时间去实践了,一定回来分享
------------------------------------------------------------------------------------------------------------------
目前在做的项目,也运用到了图像识别技术。优化过的框架,是通过一篇文章得来的启发:https://www.pyimagesearch.com/2017/06/19/image-difference-with-opencv-and-python/#comment-429138
直接看下图也行:
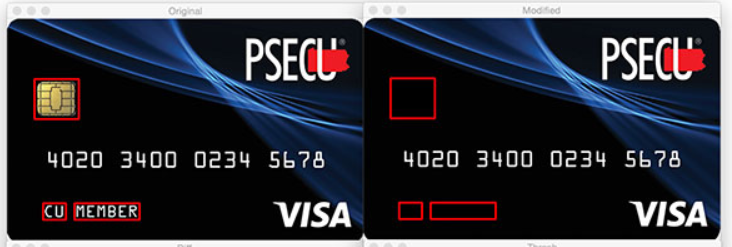
两张信用卡的图片,左图有芯片和几个字母,右图没有。通过图像识别,两张图做比对,找出了差异,并把差异都标记了出来,这样看图片差异,是不是就一目了然了
根据上面的思路,需要两张图,一个是用来做对比的基础图片(Base),一个是拿来跟基础图片比较的图片(Compare)
所以,在UI自动化测试的流程中,加入一个录制基础图片的过程,比如上周的版本,我们跑自动化测试用例,录制了基础图片,这周发版本,我们跑自动化测试用例后,把这个版本的图片跟上个版本的图片做比对,如果完全一致,那说明测试通过,如果有差异,要么是bug,要么是需求改动了UI。这样做的好处是:一般自动化测试工程师不能像功能测试工程那样,完全关心到每个版本的需求变动,这样检测出来的结果最为正确。
先上一部分代码(就是上图中信用卡比对差异的实现方法),后续有时间再把整个框架图整理出来
import imutils from skimage.measure import compare_ssim import cv2 import numpy as np class MarkDiffImg: @staticmethod def cv_imread(file_path): """ 读取图片(解决路径中含有中文无法读取的问题),一般是直接cv2.imread(filea_path) :param file_path:图片的路径 :return: """ cv_img = cv2.imdecode(np.fromfile(file_path, dtype=np.uint8), -1) return cv_img def mark_diff_img(self, result, basesnapshot_png, runningsnapshot_png, DiffSnapshot_Dir, casename, name): """ 对比图片并标出差异,保存差异图片 :param basesnapshot_png: :param runningsnapshot_png: :param DiffSnapshot_Dir: :param casename: :param name: :return: """ # 加载两张图片并将他们转换为灰度: image_a = self.cv_imread(basesnapshot_png) image_b = self.cv_imread(runningsnapshot_png) gray_a = cv2.cvtColor(image_a, cv2.COLOR_BGR2GRAY) gray_b = cv2.cvtColor(image_b, cv2.COLOR_BGR2GRAY) # 计算两个灰度图像之间的结构相似度指数: (score, diff) = compare_ssim(gray_a, gray_b, full=True) diff = (diff * 255).astype("uint8") print("SSIM:{}".format(score)) # 找到不同点的轮廓以致于我们可以在被标识为“不同”的区域周围放置矩形: thresh = cv2.threshold(diff, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1] cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = imutils.grab_contours(cnts) # 找到一系列区域,在区域周围放置矩形: for c in cnts: x, y, w, h = cv2.boundingRect(c) cv2.rectangle(image_a, (x, y), (x + w, y + h), (255, 0, 0), 2) cv2.rectangle(image_b, (x, y), (x + w, y + h), (255, 0, 0), 2) # 基础快照标出与运行时快照的差异 图片 diffsnapshot_png_a = DiffSnapshot_Dir + casename + '/' + name + '_base.png' # 运行时快照标出与基础快照的差异 图片 diffsnapshot_png_b = DiffSnapshot_Dir + casename + '/' + name + '_running.png' # 保存差异图片 cv2.imencode('.jpg', image_a)[1].tofile(diffsnapshot_png_a) cv2.imencode('.jpg', image_b)[1].tofile(diffsnapshot_png_b) result["对比快照-基础快照路径"] = diffsnapshot_png_a result["对比快照-运行时快照路径"] = diffsnapshot_png_b return result