python
python2.7用于NAO开发
https://www.python.org/downloads/release/python-2718/
python3.6用于其他程序测试。
https://www.python.org/downloads/release/python-368/
python2.7SDK
https://developer.softbankrobotics.com/nao6/downloads/nao6-downloads-windows
配置环境
https://developer.softbankrobotics.com/nao6/naoqi-developer-guide/sdks/python-sdk/python-sdk-installation-guide
官网没屁用,有错误,讲不清。
path里面添加python27路径,以及naoqi路径。
注意naoqi解压后是一个文件夹包含一个文件夹,才到lib等文件夹集合。
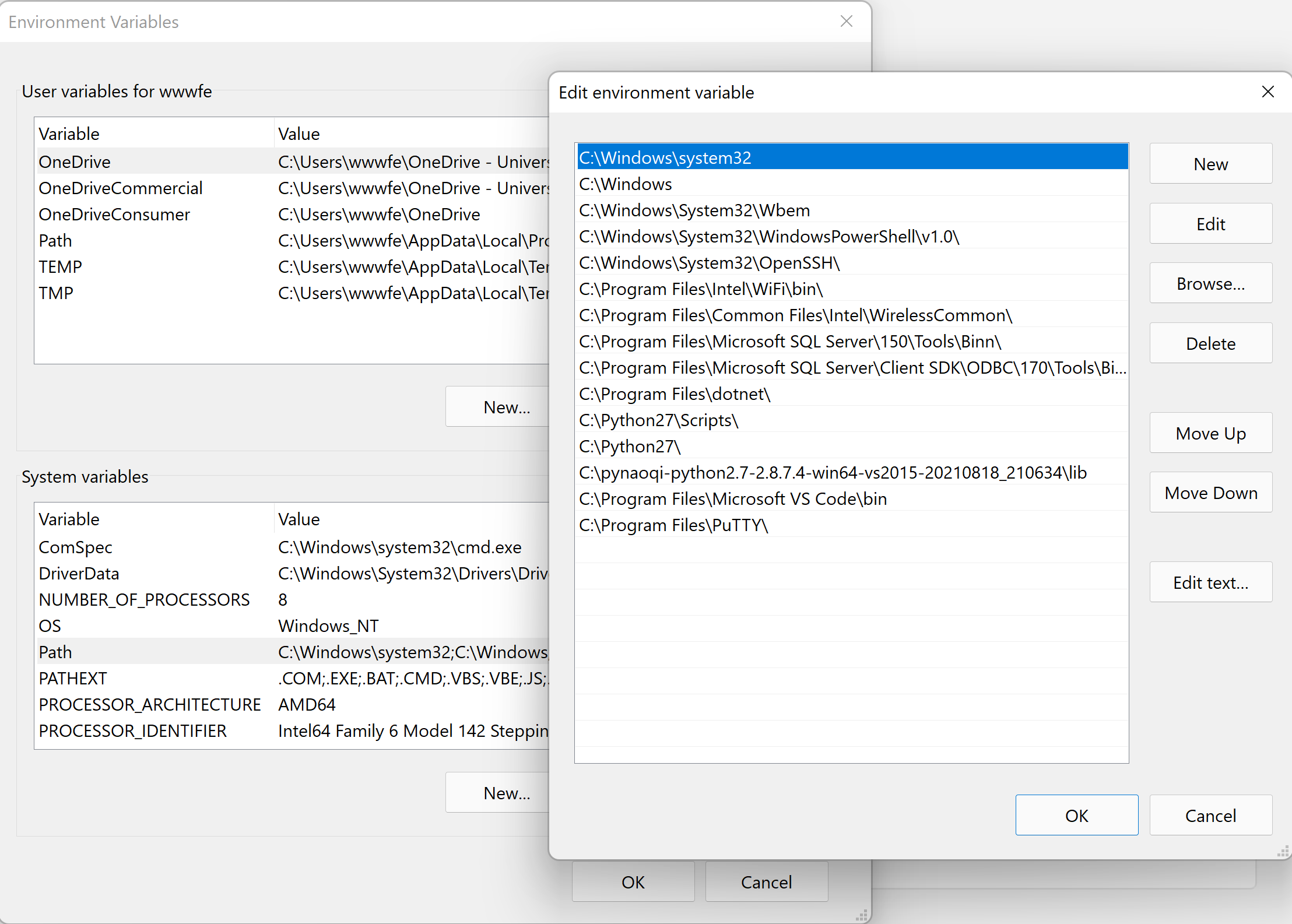
注意这里无论怎么搞也没用,上面那个才能添加naoqi
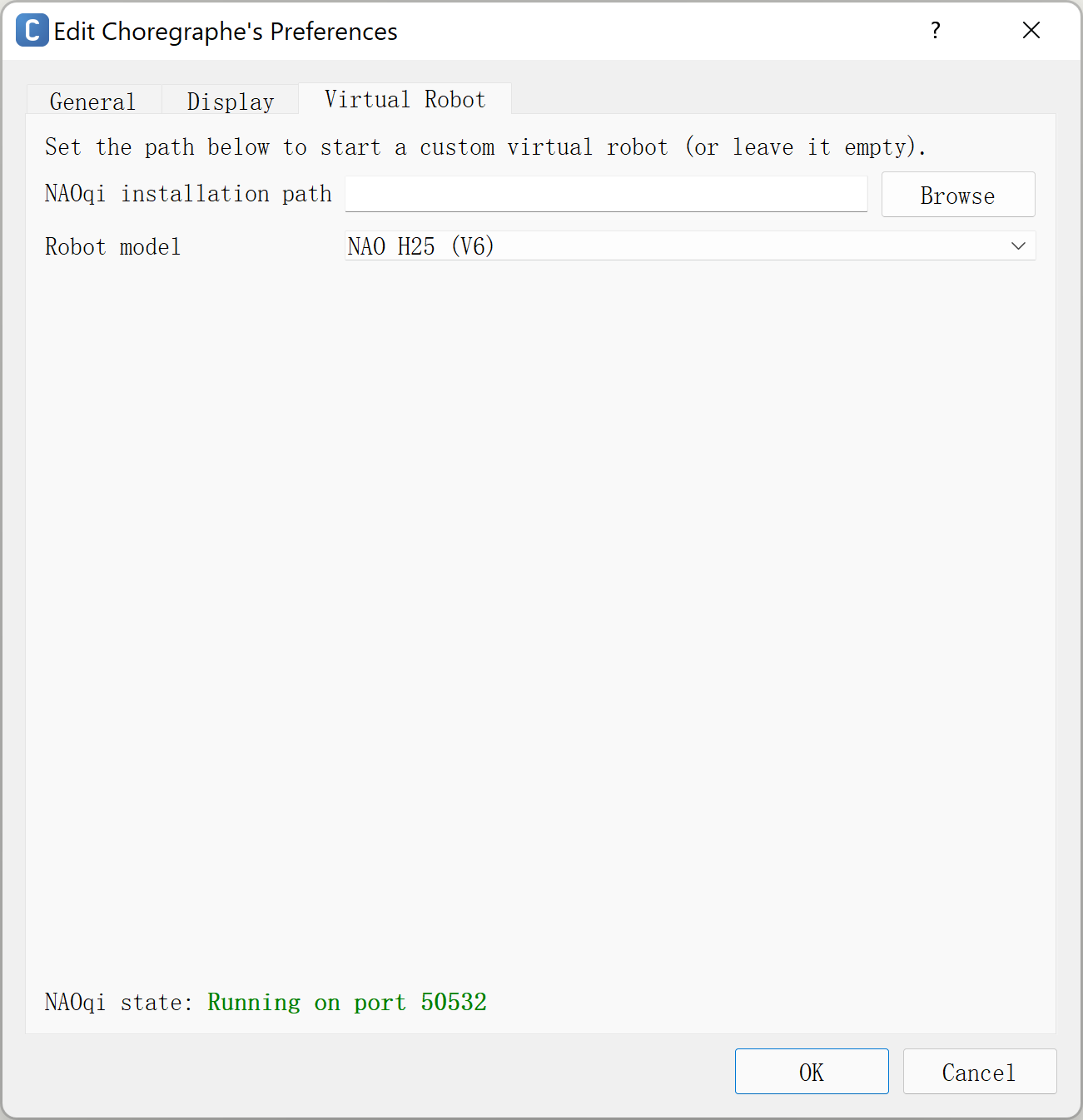
这里的naoqi的端口好很重要,是这个虚拟nao机器人的端口号。
Choregraphe
https://developer.softbankrobotics.com/nao6/downloads/nao6-downloads-windows
安装缺失DLL
https://www.robotlab.com/support/choregraphe-bin.exe-system-error-fix
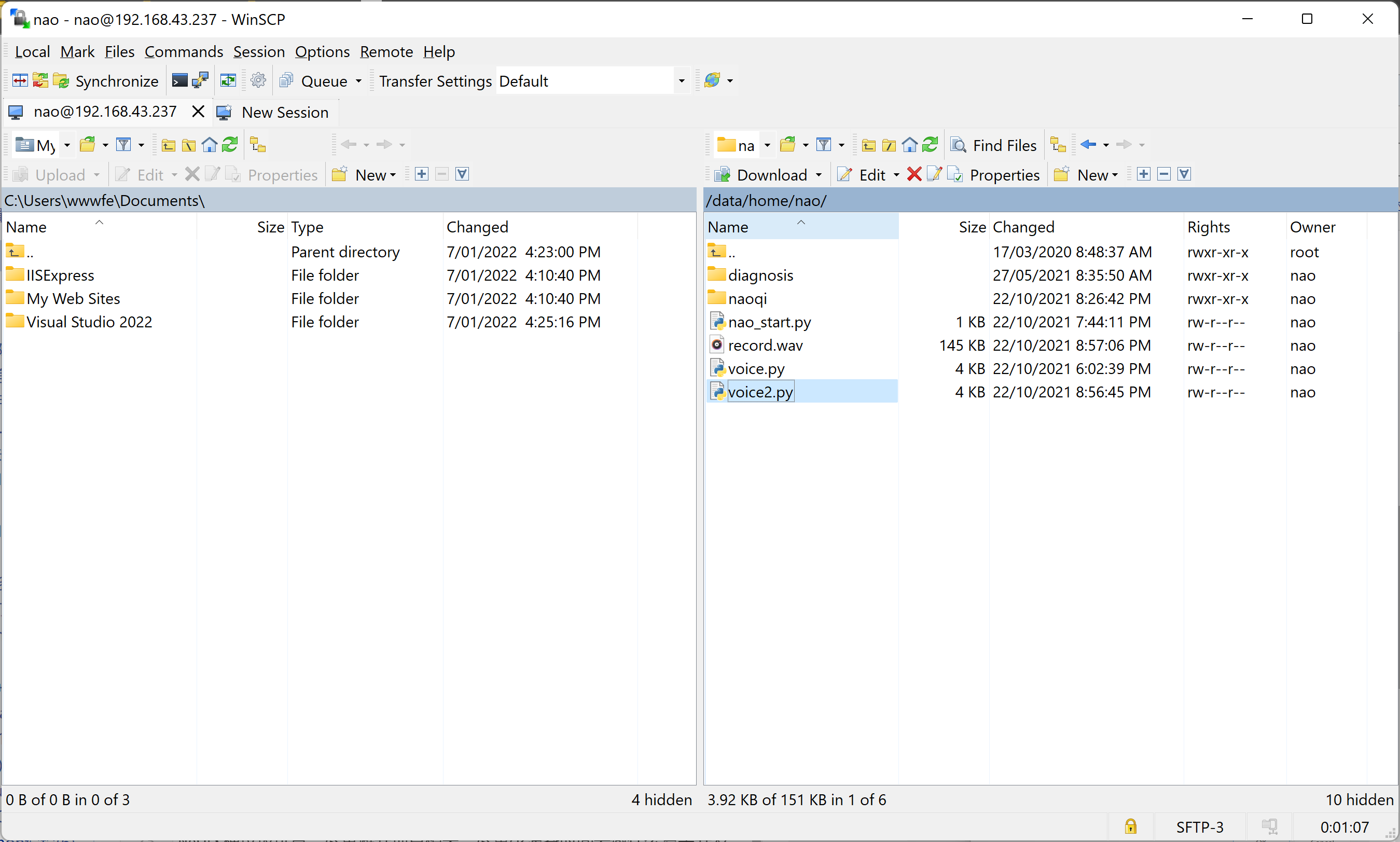
远程传输工具winscp
https://winscp.net/eng/download.php
里面有Putty,可以从这里安装它。
按NAO机器人胸部三下,取得IP地址。
选择SCP,输入IP地址和22端口号默认,输入账户和密码:nao
账户和密码可以在web浏览器里面输入IP地址修改。
python sdk库
http://doc.aldebaran.com/1-14/naoqi/sensors/alleds-api.html
NAO文档里面太简略了。又没有这个库文档的链接。
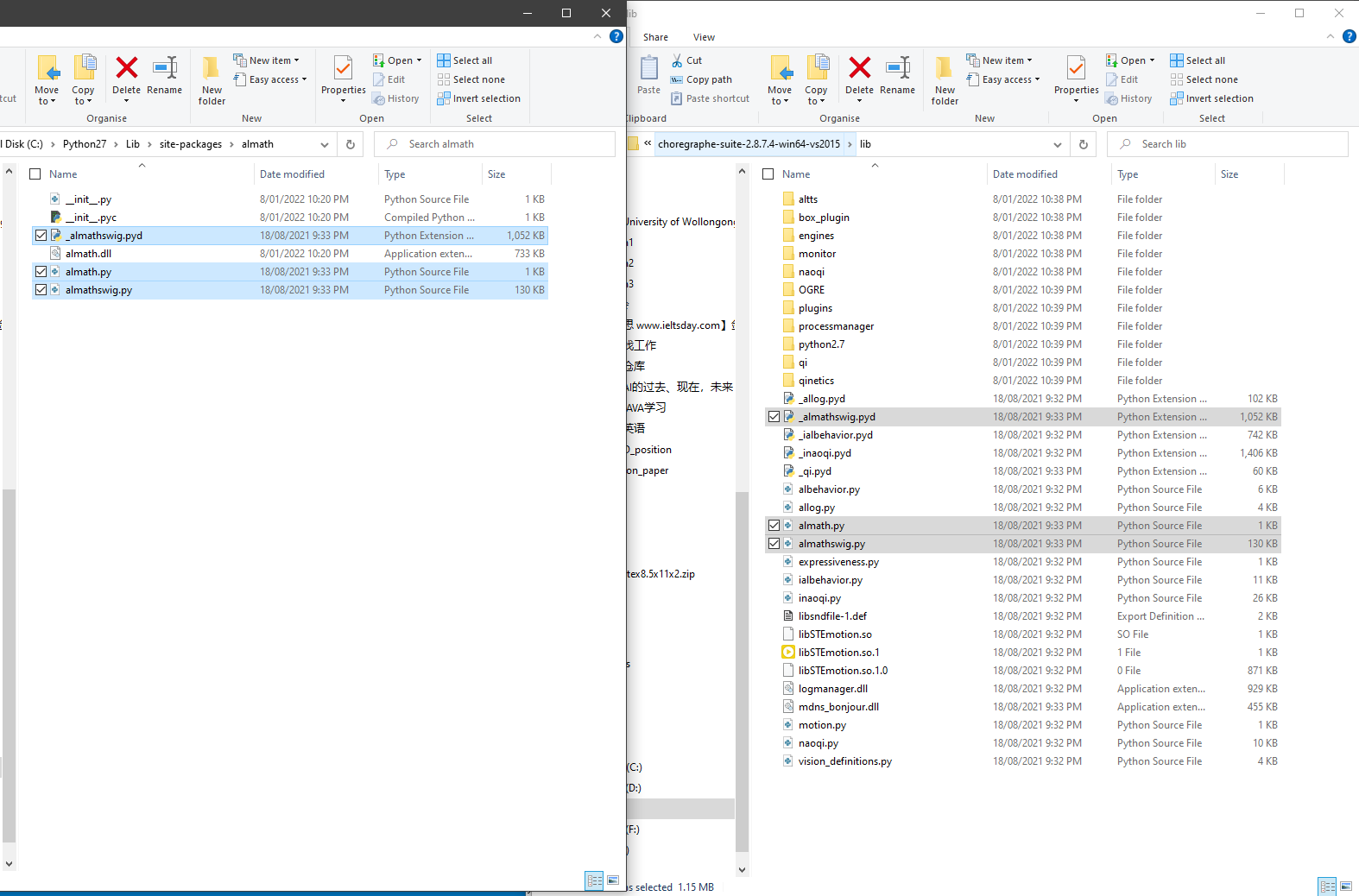
python控制NAO运动Almathswig error
https://stackoverflow.com/questions/66732022/almathswig-error-when-trying-to-use-almath-to-program-nao-robot
从官网下载最新版免安装版本,解压后拷贝lib里面相关文件进去就可以了。
python控制NAO动作
程序员本能自然看文档库,然后用python执行各种角度的变换,但是除了上面的error。虽然这次成功,但防止日后会遇见其他bug。所以有个取巧的思路,使用NAO的Choregraphe软件设计动作,保存后调用即可。
https://blog.csdn.net/new_light/article/details/8821868?locationNum=3&fps=1
最后吐槽
NAO这种垃圾玩意,尽量避开项目相关,尽量少浪费时间去做什么复杂开发。简化版的Linux系统实现什么都很麻烦。专业程序员感觉麻烦。非专业也玩不转它复杂的可视化编程。两种方式都不健全,很鸡肋。