#Linux
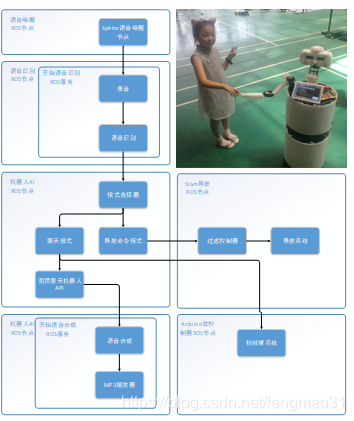
假如你选择纯Linux的ROS系统作为控制、交互、通信的载体,那么你需要使用sphinx和百度语音完成语音唤醒、语音识别、语音合成。但是由于sphinx只支持英文和没有抗噪音能力,而且只有在Ubuntu14上配置简单,所以这个方案效果只是理论上的实验室玩具。
这个方案实际上是把一个语音识别强行作为语音唤醒,来触发百度的语音服务来进行语音识别和合成。
我们可以看下效果。
https://www.bilibili.com/video/av26614323
https://www.bilibili.com/video/av23114872
在2017年下半年,科大讯飞推出机器人打包的语音服务,有了新的解决途径来解决语音唤醒问题。但是比较贵,使用只有3个月时间。
另外据上海大学电气系机器人团队反应ARM架构的TX1上面依然难以解决语音唤醒。两个语音识别嵌套de
#Linux+Android
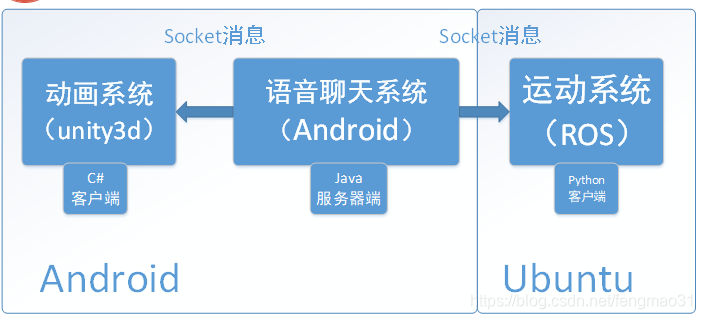
由于早期2015、2016年国内相应的软硬件配套几乎没有,所以利用国内较好的Android系统开发环境来制作语音等人机交互是明智的选择。
使用双系统可以使得我们既使用ROS系统来控制机器人,又使用Android系统来完成语音以及百度地图等功能。或者设计复杂的通信结构和数据结构来进行双系统甚至多系统的协作,彻底解决代码硬件系统不兼容问题。
第一家商用ROS机器人就是使用Linux系统和Android系统混合。
很多ROS的先行者吐槽ROS的Bug多多,通信结构复杂,系统报错玄学等问题,我认为设计系统架构时,把ROS系统封装在一个极小的模块里。