1.CAN协议介绍
CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO 国际标准化的串行通信
协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种
各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求
不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、
“通过多个 LAN,进行大量数据的高速通信”的需要, 1986 年德国电气商博世公司开发出面
向汽车的 CAN 通信协议。此后, CAN 通过 ISO11898 及 ISO11519 进行了标准化,现在在欧
洲已是汽车网络的标准协议。
现在, CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设
备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的
计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有
力的技术支持。
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,
二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
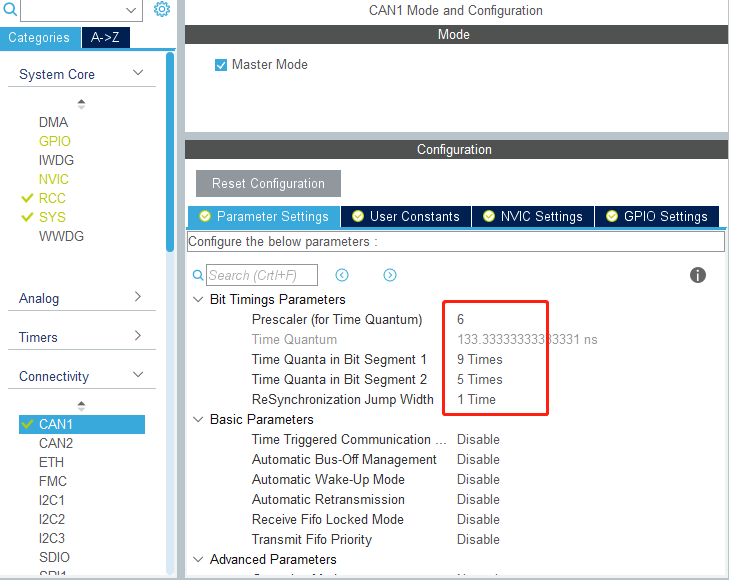
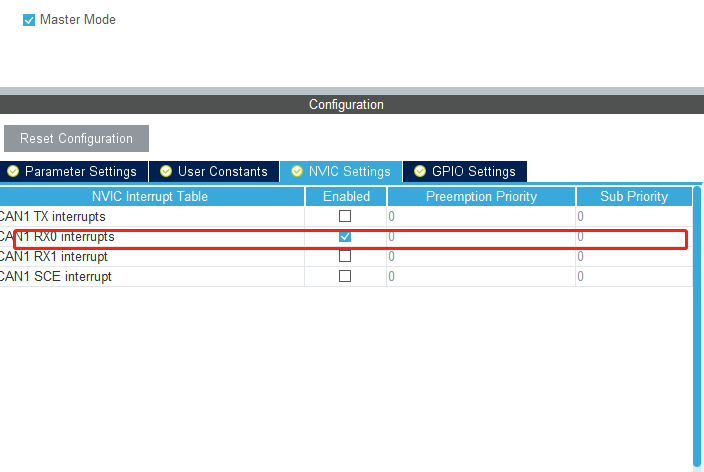
2.Cube配置
基本配置跳过,直接讲CAN的配置,只是收发的话,配好CAN的时钟加上开个接收中断就行了。
CAN的时钟配置是挂载在APB1的时钟上的,可根据这一点来计算CAN总线的波特率,比如本例程的APB1
是45MHz,则CAN总线的波特率为 :45M/((9+5+1)*6)M=500KMz。
要注意的是阿波罗F429的CAN数据线的GPIO口是在PA11和PA12,但Cube自动生成的不是这两个GPIO口。
记得改一下GPIO口复用,软件要和硬件要匹配。

Cube生成的代码如下:
/* Includes ------------------------------------------------------------------*/ #include "can.h" /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ CAN_HandleTypeDef hcan1; /* CAN1 init function */ void MX_CAN1_Init(void) { hcan1.Instance = CAN1; hcan1.Init.Prescaler = 6; hcan1.Init.Mode = CAN_MODE_NORMAL; hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan1.Init.TimeSeg1 = CAN_BS1_9TQ; hcan1.Init.TimeSeg2 = CAN_BS2_5TQ; hcan1.Init.TimeTriggeredMode = DISABLE; hcan1.Init.AutoBusOff = DISABLE; hcan1.Init.AutoWakeUp = DISABLE; hcan1.Init.AutoRetransmission = DISABLE; hcan1.Init.ReceiveFifoLocked = DISABLE; hcan1.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan1) != HAL_OK) { Error_Handler(); } } void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(canHandle->Instance==CAN1) { /* USER CODE BEGIN CAN1_MspInit 0 */ /* USER CODE END CAN1_MspInit 0 */ /* CAN1 clock enable */ __HAL_RCC_CAN1_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /**CAN1 GPIO Configuration PA11 ------> CAN1_RX PA12 ------> CAN1_TX */ GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF9_CAN1; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); /* CAN1 interrupt Init */ HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0); HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn); /* USER CODE BEGIN CAN1_MspInit 1 */ /* USER CODE END CAN1_MspInit 1 */ } } void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle) { if(canHandle->Instance==CAN1) { /* USER CODE BEGIN CAN1_MspDeInit 0 */ /* USER CODE END CAN1_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_CAN1_CLK_DISABLE(); /**CAN1 GPIO Configuration PA11 ------> CAN1_RX PA12 ------> CAN1_TX */ HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12); /* CAN1 interrupt Deinit */ HAL_NVIC_DisableIRQ(CAN1_RX0_IRQn); /* USER CODE BEGIN CAN1_MspDeInit 1 */ /* USER CODE END CAN1_MspDeInit 1 */ } } /* USER CODE BEGIN 1 */ /* USER CODE END 1 */
3.Cube收发例程
除了Cube的配置外,我们还要配置一个CAN_FilterTypeDef(CAN1滤波器)和一个CAN_TxHeaderTypeDef(CAN1发送消息句柄),然后
就可以启动CAN,使能CAN中断,至于CAN_RxHeaderTypeDef(CAN1接收消息句柄)只用定义不用配置。
CAN_TxHeaderTypeDef hCAN1_TxHeader; //CAN1发送消息
CAN_RxHeaderTypeDef hCAN1_RxHeader; //CAN1接收消息
CAN_FilterTypeDef hCAN1_Filter; //CAN1滤波器
/******************************************************************************* * Function Name : vApp_CAN_TxHeader_Init * Description : 初始化发送帧头句柄 * Input : pHeader 发送帧头指针 StdId 标识符 ExtId 扩展标识符 IDE 0:标准帧 1:拓展帧 RTR 0:数据帧 1:远程帧 DLC 数据长度 * Output : None * Return : None ****************************************************************************** */ void vApp_CAN_TxHeader_Init(CAN_TxHeaderTypeDef * pHeader, uint32_t StdId, uint32_t ExtId, uint32_t IDE, uint32_t RTR, uint32_t DLC) { pHeader->StdId = StdId; //11位 标准标识符 pHeader->ExtId = ExtId; //29位 扩展标识符 pHeader->IDE = IDE; //1位 0:标准帧 1:拓展帧 pHeader->RTR = RTR; //1位 0:数据帧 1:远程帧 pHeader->DLC = DLC; //4位 发送的数据的长度 pHeader->TransmitGlobalTime = ENABLE; } /******************************************************************************* * Function Name : vApp_CAN_Filter_Init * Description : 初始化滤波器 * Input : pFilter 滤波器句柄,初始化全部值 IdHigh, IdLow, MaskIdHigh, MaskIdLow, FIFOAssignment, Bank, Mode, Scale, Activation, SlaveStartFilterBank * Output : None * Return : None ****************************************************************************** */ void vApp_CAN_Filter_Init(CAN_FilterTypeDef * pFilter, uint32_t IdHigh, uint32_t IdLow, uint32_t MaskIdHigh, uint32_t MaskIdLow, uint32_t FIFOAssignment, uint32_t Bank, uint32_t Mode, uint32_t Scale, uint32_t Activation, uint32_t SlaveStartFilterBank) { pFilter->FilterIdHigh = 0; pFilter->FilterIdLow = 0; pFilter->FilterMaskIdHigh = 0; pFilter->FilterMaskIdLow = 0; pFilter->FilterFIFOAssignment = CAN_FILTER_FIFO0; pFilter->FilterBank = 0; pFilter->FilterMode = CAN_FILTERMODE_IDMASK; pFilter->FilterScale = CAN_FILTERSCALE_32BIT; pFilter->FilterActivation = ENABLE; pFilter->SlaveStartFilterBank = 0; }
/*******************************************************************************
* Function Name : vApp_User_CAN_Configuration
* Description : 初始化CAN(用户修改)
* Input : None
* Output : None
* Return : None
****************************************************************************** */
void vApp_User_CAN_Configuration(void)
{
/*----------------- CAN初始化配置 --------------------------*/
vApp_CAN_Configuration(&hCAN1_TxHeader, &hCAN1_Filter,
/* TxHeader 句柄配置 */
/* StdId ExtId IDE RTR DLC */
0x12, 0, CAN_ID_STD, CAN_RTR_DATA, 8,
/* Filter 句柄配置 */
/* IdHigh IdLow MaskIdHigh MaskIdLow FIFOAssignment Bank Mode Scale Activation SlaveStartFilterBank */
0, 0, 0, 0, CAN_FILTER_FIFO0, 0, CAN_FILTERMODE_IDMASK, CAN_FILTERSCALE_32BIT, ENABLE, 0);
}
/******************************************************************************* * Function Name : vApp_CAN_Configuration * Description : CAN初始化配置,配置发送帧头,配置滤波器 * Input : (...) * Output : None * Return : None ****************************************************************************** */ void vApp_CAN_Configuration(CAN_TxHeaderTypeDef * pTxHeader, CAN_FilterTypeDef * pFilter, uint32_t StdId, uint32_t ExtId, uint32_t IDE, uint32_t RTR, uint32_t DLC, uint32_t IdHigh, uint32_t IdLow, uint32_t MaskIdHigh, uint32_t MaskIdLow, uint32_t FIFOAssignment, uint32_t Bank, uint32_t Mode, uint32_t Scale, uint32_t Activation, uint32_t SlaveStartFilterBank) { /*-1- 初始化TxHeader句柄 ----------------------------------------*/ vApp_CAN_TxHeader_Init(pTxHeader, StdId, ExtId, IDE, RTR, DLC); /*-2- 初始化滤波器句柄 ------------------------------------------*/ vApp_CAN_Filter_Init(pFilter, IdHigh, IdLow, MaskIdHigh, MaskIdLow, FIFOAssignment, Bank, Mode, Scale, Activation, SlaveStartFilterBank); HAL_CAN_ConfigFilter(&hcan1, pFilter); /*-3- 启动CAN ---------------------------------------------------*/ while(HAL_CAN_Start(&hcan1) != HAL_OK ) { printf(" CAN_Start Failed!!"); HAL_Delay(100); } printf(" CAN_Start Success!!"); /*-4- 使能中断通知 ----------------------------------------------*/ HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING); }
发送的只用调用HAL库的HAL_CAN_AddTxMessage函数就行了
/*******************************************************************************
* Function Name : vApp_User_CAN1_TxMessage
* Description : 使用CAN1发送数据
* Input : None
* Output : None
* Return : None
****************************************************************************** */
void vApp_User_CAN1_TxMessage(uint8_t aTxData[], uint8_t DLC)
{
vApp_CAN_TxMessage(&hcan1, &hCAN1_TxHeader, aTxData, DLC);
}
/******************************************************************************* * Function Name : vApp_CAN_TxMessage * Description : 邮箱发送数据 * Input : hcan pTxHeader 发送帧头 aData 数据段 DLC 数据段长度 * Output : None * Return : None ****************************************************************************** */ void vApp_CAN_TxMessage(CAN_HandleTypeDef *hcan, CAN_TxHeaderTypeDef * pTxHeader, uint8_t aData[], uint8_t DLC) { uint32_t Tx_MailBox; /*-1- 配置数据段长度 ----------------------------------------*/ pTxHeader->DLC = DLC; /*-2- 发送aData ---------------------------------------------*/ while(HAL_CAN_AddTxMessage(hcan, pTxHeader, aData, &Tx_MailBox) != HAL_OK) { printf("TxMsg Failed!!"); HAL_Delay(100); } printf(" Send Tx Message Success!!Tx_Mail:%d", Tx_MailBox); }
接收是用中断回调函数void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)来接收信息,这个是个HAL库里的弱函数,要自己重写。
/******************************************************************************* * Function Name : HAL_CAN_RxFifo0MsgPendingCallback * Description : 消息接收回调函数 * Input : hcan * Output : None * Return : None ****************************************************************************** */ void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) { uint8_t aRxData[8], i; if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &hCAN1_RxHeader, aRxData) == HAL_OK) { printf(" Get Rx Message Success!! Data:"); for(i=0; i<8; i++) printf("%d", aRxData[i]); } }
4.测试
本次测试用的CAN分析仪是周立功的CANalyst-II,上位机是CANTest,下面介绍一下怎么用。根据上面计算的波特率,设置为500K,然后点最后的一栏

单片机主函数程序如下:
int main(void) { /* USER CODE BEGIN 1 */ uint8_t key; uint8_t TxData[8] = {0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88}; /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_CAN1_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ vApp_User_CAN_Configuration(); // KEY_Init(); //初始化按键 /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { vApp_User_CAN1_TxMessage(TxData, 8); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }
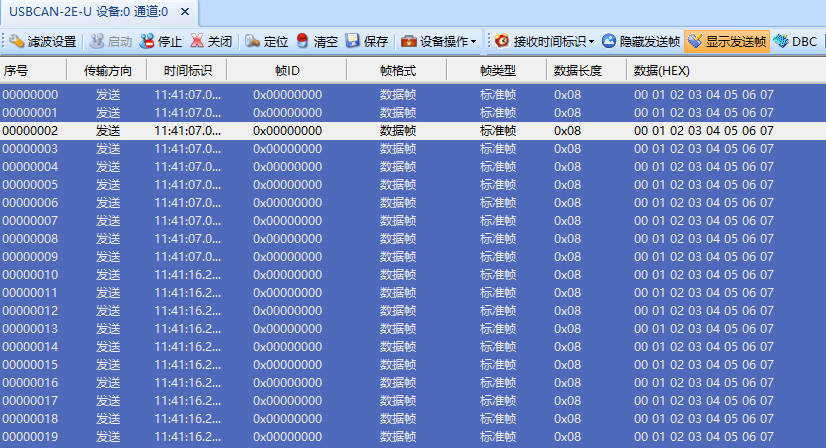
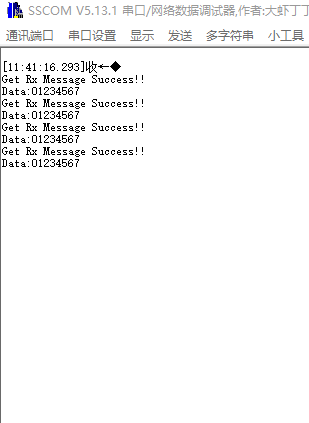
测试结果如下:
发送:
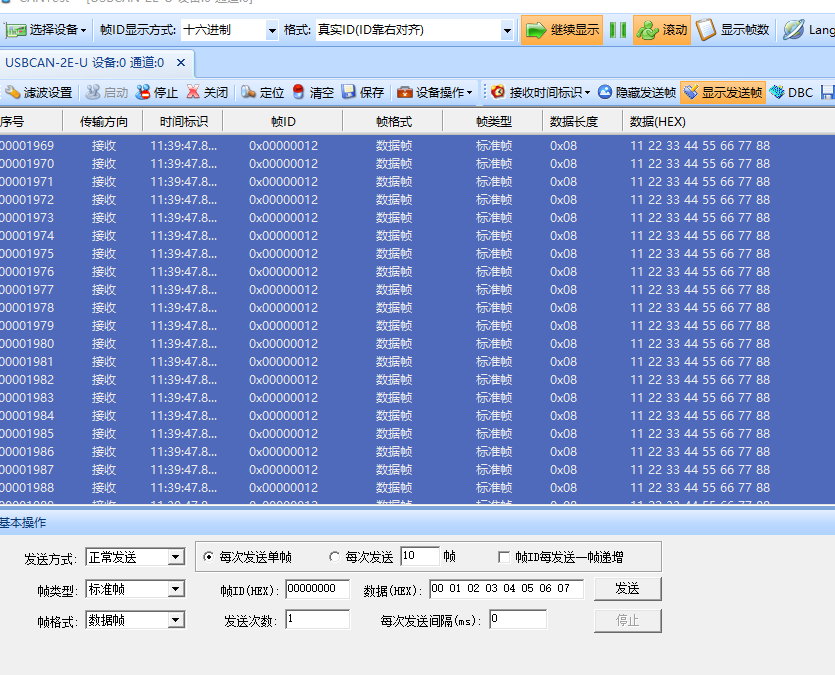
接收: