标题:A review and comparison of ontology-based approaches to robot autonomy ALBERTO
下载地址:https://www.cambridge.org/core/journals/knowledge-engineering-review/article/review-and-comparison-of-ontologybased-approaches-to-robot-autonomy/C0EF5777394264ABA95B28DBEA215FFF
作者:
0. 摘要
在接下来的几十年中,机器人将需要能够在各种各样的环境中自动执行各种各样的任务。 为了减轻由此产生的编程工作量,可以采用基于知识的机器人编程方法来将信息组织为可重复使用的知识片段。 但是,为了易于重用,需要在术语含义上达成一致。 一种通用方法是使用概念化各个领域的本体语言来表示这些术语。 在这项工作中,我们将审查使用本体来支持机器人自主性的项目。 我们将系统地搜索满足一组包含标准的项目,并就它们的本体范围,使用本体支持哪些类型的认知能力以及它们的应用领域进行比较。
1. 介绍
在接下来的几十年中,研究和行业预计将开发用于各种任务和环境的各种自动机器人。 所设想的机器人包括,例如,家庭服务机器人,其准备饭菜,设置餐桌并对其进行清洁;以及 农业机器人监视田地,分析植物的生长,检测和分类植物病害,耕种田地并收集收成; 零售商店中的机器人负责库存,并在需要时补充货架。 最大的挑战之一是任务,机器人和环境的每种组合都需要特定的机器人控制程序。
使产生的编程工作可行的一种方法是采用基于知识的机器人编程范例(Beetz等,2012)。 基于知识的编程的基本思想是将知识与程序分离,并将其模块化为可广泛使用的小块,例如通过其手柄抓取对象,直立放置已装满的容器,不要用力挤压易碎物品等。 例如,程序会问:我应该如何捡起我面前的物体? 然后,推理机制将收集相关的知识单元并将其组合起来,以提出适当的抓握。
基于知识的机器人编程方法的优势在于,这些知识片适用于许多应用程序,并且可以极大地加速新机器人应用程序的实现。 例如,关于工业协作机器人环境中的安全性的知识是通用的,并且适用于人类和机器人可以协同执行的几个不同任务。 因此,基于知识的编程使程序员能够编写与任务,机器人和环境完全无关的控制程序,并可以将有关任务,机器人和环境的必要知识陈述为单独的模块化知识库。 特别是,基于RoboEarth(Waibel等人,2011)和openEASE(Beetz等人,2015c)的基于Web的知识服务的概念使机器人能够收集和共享许多机器人的知识,这是有前途的。
不同机器人之间以及单个机器人控制系统的不同子系统之间的知识共享要求,用于传达知识的概念必须是机器可理解且一致的。 例如,考虑一下知识块通过它们的句柄来抓取对象,只有当生成知识块的机器人和使用该知识块的机器人在抓取,对象和句柄的含义上达成共识时,该知识块才能在不同的机器人应用程序之间有效地转移。 因此,需要以一种机器可理解的形式定义这些术语的概念化,这种形式可以被生成和使用该知识的机器人所接受。 这正是本体的目的。
在本文中,我们对自动机器人应用程序的本体论进行了回顾。 我们对采用本体来支持机器人自治的特定框架感兴趣,而不是对为机器人设计的特定本体感兴趣。
所介绍的工作是在IEEE-SA P1872.2自主机器人技术(AuR)本体标准的背景下进行的,该标准起源于IEEE机器人技术与自动化(ORA)WG的子组。 IEEE ORA WG于2011年初开始作为研究组,并于2011年11月成为正式工作组。从一开始,IEEE ORAWG便被划分为多个子组,每个子组负责研究特定的机器人和自动化子领域, 例如机器人任务1和自主机器人2。
还有其他几位作者讨论了有关本体论和机器人技术的文献。其中一些专注于特定的最终编程工作机器人任务,并就其对所研究任务的适用性比较了不同的基于知识的方法。例如,Thosar等人(2018)研究了九个机器人知识库是否适用于用相似的对象替换在任务(例如工具)中起作用的丢失对象的任务。我们在这里的工作类似,因为我们也研究了不同的机器人知识库,但不是从特定任务的角度出发,而是从本体论如何支持机器人自治的更一般的角度。 Paulius&Sun(2018)提出了另一项类似的研究,其中作者就如何在机器人系统中获取,表示和重用知识方面的不同知识表示原理进行了讨论。基于这一讨论,作者认为,对于任何“足够”的机器人知识表示,都必须实现一组关键组件。本文中提出的工作的目的不是为了概述本体如何用于支持机器人自治,而是提出关键功能列表。
这项工作的贡献是:
1. 基于本体的机器人自治方法的分类;和
2. 讨论了使用本体来支持自治的自治机器人技术的现有方法,并对其进行了比较。
本文的结构如下。 在第2节中,我们提供了有关这两个学科交叉发展的学科的背景信息:本体论和自主机器人。 在第3节中,我们讨论了一种使用本体论来支持机器人自治的方法的分类方案,该方案用于比较在第4节中满足一组包含标准的几种方法。最后,本文在第5节中进行了总结。
2. 本体和自主机器人学的基础
在本节中,我们首先将本体作为知识工件进行介绍,并列出一些与以后的讨论相关的本体分类。 然后,我们回顾一下自主机器人技术中使用的术语,以及一些对代理人自治至关重要的(计算)问题和能力。
2.1 本体
Gruber(1993)提出了定义本体的最初尝试之一:本体是对概念化的明确说明。 Gruber的定义是非正式的,一些作者试图通过指定概念化(Guarino&Giaretta,1995)或添加诸如正式和共享的其他要求(Borst等,1997; Studer等1998)来完善它 。 我们不得不再等十年才能解决这个问题。 在Guarino等人(2009)中,对术语进行了技术讨论,并最终给出了本体的正式定义。
从格鲁伯的直觉出发,本体论取决于概念化,瓜里诺等人解释说,概念化(从数学上来说)是一种有意的关系结构,即话语领域(一组实体),一组可能的世界(可能的实体布局)和一组关系(说明每个可能世界中哪些房地产的实体具有)。 一旦给出了概念化的正式概念,就足以确定词汇表和一个人所遵循的本体论原则,即所谓的本体论承诺。 承诺的目的是将词汇的解释限制为给定的概念化。 在这一点上,本体被定义为由一组公式组成的逻辑理论,这些公式的模型近似于(正式)可能的预期模型,即满足概念化和本体论承诺的那些模型。
由于本体论是一种逻辑理论,因此它由个人,类,功能,关系和公理组成。 确切的列表根据所采用的特定逻辑语言而变化。 通常,本体是用一阶逻辑(FOL)或Web本体语言(OWL)给出的。 个体是本体中的对象,即本体所涉及的事物。 类是属性,用于标识满足该属性的个人。 功能提供了识别和关联个人的方法。 关系是个人之间的联系。 公理是语言中的表达式,使用先前的元素来陈述本体中的真实情况。
在领域研究中,术语“本体”用于指代各种事物。 例如,对于Chandrasekaran等人(1998年)而言,本体是专门针对某个领域并受概念化约束的表示词汇。 它也被理解为关于对象,属性以及在特定知识领域内可能存在的那些对象之间的关系的领域理论。 在这种意义上,本体的目的是为特定领域提供知识结构。 因此,它仅关注领域内的观点,并且包括在该领域中工作的相关概念。 在文献中,该术语的后一种用法被称为领域本体,而Guarino等人(2009)引入的特征是笼统地涵盖领域以及基础本体论,这些本体论包含适用于所有领域的非常笼统的术语。
在开发领域本体时,可以在不挑战本体论观点的情况下提供对特定领域的描述。 目的是使领域知识明确和正式,即以正式语言确定词汇表以及专家认为其正确解释的内容,包括领域中的有效主张。 域本体可以帮助实现社区内部和社区之间的数据和模型互换性。
值得注意的是,没有域的唯一概念化。 拥有适当的领域本体有助于阐明差异并比较概念。
2.1.1 本体类型
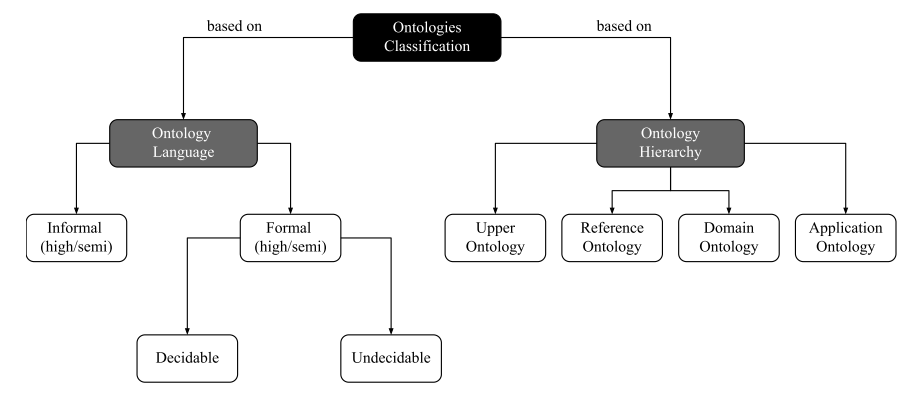
本体可以沿多个维度进行分类。 在图1中,描绘了一个图表,其中包含该工作中考虑的两种本体分类。
Uschold和Gruninger(Uschold&Gruninger,1996)提出了基于用于本体论的语言特性的分类。 它表明“本体论”一词有时含糊不清。 这种分类将本体分为四类:(a)高度非正式,(b)半非正式,(c)半正式,以及(d)严格正式。 但是,在前面的讨论之后,我们发现第一类不是在谈论本体论:它是指在本体论构建的早期阶段中的语言资源或知识库。
由于本体的语言限制了本体在信息系统中的使用方式,因此这种分类在本文中具有重要的意义。我们引入的第一个区别是非正式语言和正式语言之间的区别。非正式的,我们指的是一种没有相关形式语义的语言,例如资源描述框架(RDF),统一建模语言(的一部分)和业务流程建模表示法。它们主要用于表示任务和句法操作。这些语言的自动推理是不可靠的,因为没有系统的方法来限制它们的解释。形式化是指一种具有形式化(例如Tarskian)语义的语言,即其解释已正式确立的语言。这些语言(基于FOL和OWL)适用于知识表示和推理,因为它们基于清晰而详尽的句法和语义规则。它们是我们在科学中可获得的最可靠的语言。在形式语言中,我们还需要进一步区分:可判定语言与不可判定语言。在这里,可判定意味着在给定以该语言表达的逻辑理论的情况下,存在一种用于确定该理论中是否可推导任意公式的方法。由于本体是特殊的逻辑理论,因此以可确定的语言编写的本体是可确定的。如果一种语言不可判定,则称该语言为不可判定。使用可确定语言的本体也称为计算本体,因为它可以在运行时用于信息提取和验证,例如OWL DL。像FOL和OWL Full这样的非计算形式形式化本体不适合此类角色,因为在查询时它可能不会返回答案。由于出于应用目的,可能需要非常迅速地获得查询的答案,因此可确定性通过计算复杂性方面的考虑得到了充实(Papadimitriou 2003)。
本体分类通常将本体系统分为上层,参考,领域和应用。 上层本体是一种本体,它关注广泛适用的概念,例如对象,事件,状态,质量以及高级关系,例如零件,构成,参与和依赖。 例如SUMO(建议的上层合并本体论)(Niles&Pease,2001),Cyc本体论(Lenat&Guha,1990),基本形式本体论(Arp等人,2015)和DOLCE(语言和认知工程的描述性本体论)(Masolo 等人,2003)。
参考本体是一种专注于某一学科的本体,其目的是确定其中的通用术语。它在医学,工程,企业等学科中具有很高的可重用性(Guarino,1998)。当本体集中在更有限的领域(例如,制造业或旅游业)时,我们称其为领域本体。这种本体论提供了有关领域内的概念及其关系,有关该领域内发生的活动以及有关管理该领域的理论和基本原理的词汇。领域本体中的概念主要是已经在上层本体和参考本体中定义的概念的特殊化,并且与Góomez-Pérez等人(2004)的关系也可能发生这种情况。应用程序本体包含对特定应用程序(例如CAD / CAM系统或ERP)所需的知识进行建模所需的所有定义。另一个主要的分类系统可用于区分参考本体和领域本体,并侧重于主题覆盖范围。企业本体(Uschold等,1998),过程规范语言(Grüninger,2004)和CORA(Schlenoff等,2012)就是这种分类的例子。如世界各地的图书馆分类系统所显示的,有不同的方法可以对主题进行分类。
2.2 自主机器人