20155236 《信息安全系统设计基础》第8周学习总结
网络编程
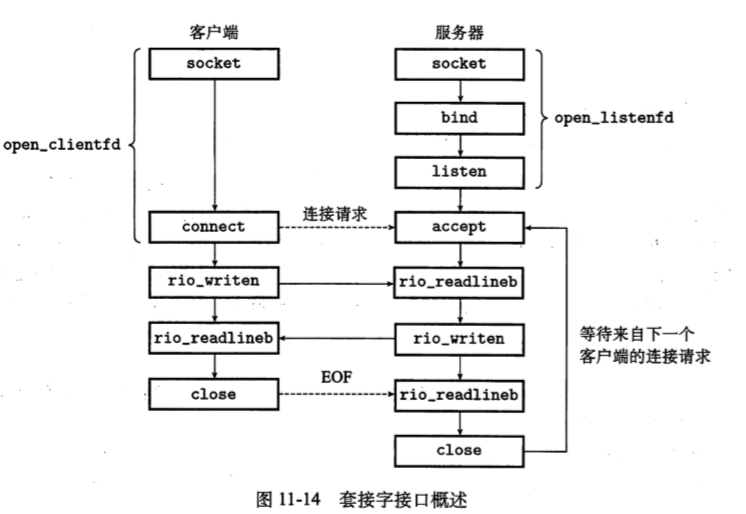
- 套接字接口概述:
并发编程
- 并发:逻辑控制流在时间上重叠
- 并发程序:使用应用级并发的应用程序称为并发程序。
- 三种基本的构造并发程序的方法:
- 进程,用内核来调用和维护,有独立的虚拟地址空间,显式的进程间通信机制。
- I/O多路复用,应用程序在一个进程的上下文中显式的调度控制流。逻辑流被模型化为状态机。
- 线程,运行在一个单一进程上下文中的逻辑流。由内核进行调度,共享同一个虚拟地址空间。
基于进程的并发编程
- 构造并发程序最简单的方法——用进程。常用函数如下:fork,exec,waitpid
- 构造并发服务器:在父进程中接受客户端连接请求,然后创建一个新的子进程来为每个新客户端提供服务。
- 需要注意的事情:
- 父进程需要关闭它的已连接描述符的拷贝(子进程也需要关闭)
- 必须要包括一个SIGCHLD处理程序来回收僵死子进程的资源
- 父子进程之间共享文件表,但是不共享用户地址空间
- 独立地址空间的优点是防止虚拟存储器被错误覆盖,缺点是开销高,共享状态信息才需要IPC机制
基于I/O多路复用的并发编程
- echo服务器必须响应两个相互独立的I/O时间:
- 网络客户端发起连接请求
- 用户在键盘上键入命令行
- I/O多路复用技术的基本思路:使用select函数,要求内核挂起进程,只有在一个或多个I/O事件发生后,才将控制返回给应用程序。
- 将描述符集合看成是n位位向量:
b(n-1),……b1,b0,每个位bk对应于描述符k,当且仅当bk=1,描述符k才表明是描述符集合的一个元素。可以做以下三件事:- 分配;
- 将一个此种类型的变量赋值给另一个变量;
- 用FDZERO、FDSET、FDCLR和FDISSET宏指令来修改和检查它们。
echo函数:将来自科幻段的每一行回送回去,直到客户端关闭这个链接。- 状态机就是一组状态、输入事件和转移,转移就是将状态和输入时间映射到状态,自循环是同一输入和输出状态之间的转移。
- 事件驱动器的设计优点:
- 比基于进程的设计给了程序员更多的对程序行为的控制
- 运行在单一进程上下文中,因此,每个逻辑流都能访问该进程的全部地址空间,使得流之间共享数据变得很容易。
- 不需要进程上下文切换来调度新的流。
- 缺点:
- 编码复杂
- 不能充分利用多核处理器
- 粒度:每个逻辑流每个时间片执行的指令数量。并发粒度就是读一个完整的文本行所需要的指令数量。
基于线程的并发编程
- 线程:运行子啊进程上下文中的逻辑流。
- 线程有自己的线程上下文,包括一个唯一的整数线程ID、栈、栈指针、程序计数器、通用目的寄存器和条件码。所有运行在一个进程里的线程共享该进程的整个虚拟地址空间。
线程执行模型
- 主线程:每个进程开始生命周期时都是单一线程。
对等线程:某一时刻,主线程创建的对等线程 - 线程与进程的不同:
- 线程的上下文切换要比进程的上下文切换快得多;
- 和一个进程相关的线程组成一个对等池,独立于其他线程创建的线程。
- 主线程和其他线程的区别仅在于它总是进程中第一个运行的线程。
- 对等池的影响
- 一个线程可以杀死它的任何对等线程;
- 等待它的任意对等线程终止;
- 每个对等线程都能读写相同的共享资源。
Posix线程
- 线程例程:线程的代码和本地数据被封装在一个线程例程中。每一个线程例程都以一个通用指针作为输入,并返回一个通用指针。
创建线程
pthread create函数创建一个新的线程,并带着一个输入变量arg,在新线程的上下文中运行线程例程f。新线程可以通过调用pthread _self函数来获得自己的线程ID。
终止线程
- 一个线程的终止方式:
- 当顶层的线程例程返回时,线程会隐式的终止;
- 通过调用pthread _exit函数,线程会显示地终止。如果主线程调用pthread _exit,它会等待所有其他对等线程终止,然后再终止主线程和整个进程。
回收已终止线程的资源
pthread _join函数会阻塞,直到线程tid终止,回收已终止线程占用的所有存储器资源。pthread _join函数只能等待一个指定的线程终止。
分离线程
- 在任何一个时间点上,线程是可结合的或者是分离的。一个可结合的线程能够被其他线程收回其资源和杀死;一个可分离的线程是不能被其他线程回收或杀死的。它的存储器资源在它终止时有系统自动释放。
- 默认情况下,线程被创建成可结合的,为了避免存储器漏洞,每个可集合的线程都应该要么被其他进程显式的回收,要么通过调用
pthread _detach函数被分离。
初始化线程
pthread _once函数允许初始化与线程例程相关的状态。once _control变量是一个全局或者静态变量,总是被初始化为PTHREAD _ONCE _INIT
一个基于线程的并发服务器
- 对等线程的赋值语句和主线程的accept语句之间引入了竞争。
多线程程序中的变量共享
线程存储器模型
- 每个线程和其他线程一起共享进程上下文的剩余部分。包括整个用户虚拟地址空间,是由只读文本、读/写数据、堆以及所有的共享库代码和数据区域组成的。线程也共享同样的打开文件的集合。
- 任何线程都可以访问共享虚拟存储器的任意位置。寄存器是从不共享的,而虚拟存储器总是共享的。
将变量映射到存储器
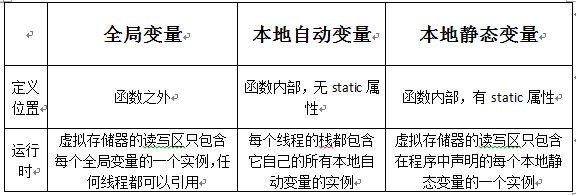
- 全局变量:虚拟存储器的读/写区域只会包含每个全局变量的一个实例。
- 本地自动变量:定义在函数内部但没有static属性的变量。
- 本地静态变量:定义在函数内部并有static属性的变量。
共享变量
- 变量v是共享的,当且仅当它的一个实例被一个以上的线程引用。
用信号量同步线程
- 共享变量引入了同步错误的可能性。
- 线程i的循环代码分解为五部分:
Hi:在循环头部的指令块Li:加载共享变量cnt到寄存器%eax的指令,%eax表示线程i中的寄存器%eax的值Ui:更新(增加)%eax的指令Si:将%eaxi的更新值存回到共享变量cnt的指令Ti:循环尾部的指令块。
进度图
- 进度图将指令执行模式化为从一种状态到另一种状态的转换。转换被表示为一条从一点到相邻点的有向边。合法的转换是向右或者向上。
- 临界区:对于线程i,操作共享变量cnt内容的指令构成了一个临界区。
- 互斥的访问:确保每个线程在执行它的临界区中的指令时,拥有对共享变量的互斥的访问。
- 安全轨迹线:绕开不安全区的轨迹线
- 不安全轨迹线:接触到任何不安全区的轨迹线就叫做不安全轨迹线
- 任何安全轨迹线都能正确的更新共享计数器。
信号量
- 当有多个线程在等待同一个信号量时,你不能预测V操作要重启哪一个线程。
- 信号量不变性:一个正在运行的程序绝不能进入这样一种状态,也就是一个正确初始化了的信号量有一个负值。
- 信号量定义:
type semaphore=record
count: integer;
queue: list of process
end;
var s:semaphore;
使用信号量来实现互斥
- 基本思想是将每个共享变量(或者一组相关的共享变量)与一个信号量s(初始为1)联系起来,然后用P和V操作将相应的临界区包围起来。
- 几个概念
- 二元信号量:用这种方式来保护共享变量的信号量叫做二元信号量,取值总是0或者1.
- 互斥锁:以提供互斥为目的的二元信号量
- 加锁:对一个互斥锁执行P操作
- 解锁;对一个互斥锁执行V操作
- 计数信号量:被用作一组可用资源的计数器的信号量
- 禁止区:由于信号量的不变性,没有实际可能的轨迹能够包含禁止区中的状态。
使用线程提高并行性
- 写顺序程序只有一条逻辑流,写并发程序有多条并发流,并行程序是一个运行在多个处理器上的并发程序。并行程序的集合是并发程序集合的真子集。
其他并发问题
线程安全
- 线程安全:当且仅当被多个并发线程反复地调用时,它会一直产生正确的结果。
- 线程不安全:如果一个函数不是线程安全的,就是线程不安全的。
- 线程不安全的类:
- 不保护共享变量的函数
- 保持跨越多个调用的状态的函数。
- 返回指向静态变量的指针的函数。解决办法:重写函数和加锁拷贝。
- 调用线程不安全函数的函数。
可重入性
- 可重入函数:当它们被多个线程调用时,不会引用任何共享数据。可重入函数是线程安全函数的一个真子集 。
- 关键思想是我们用一个调用者传递进来的指针取代了静态的next变量。
- 显式可重入:没有指针,没有引用静态或全局变量
隐式可重入:允许它们传递指针 - 可重入性即使调用者也是被调用者的属性,并不只是被调用者单独的属性。
在线程化的程序中使用已存在的库函数
- 使用线程不安全函数的可重入版本,名字以_r为后缀结尾。
竞争
- 竞争发生的原因:
- 一个程序的正确性依赖于一个线程要在另一个线程到达y点之前到达它的控制流中的x点。也就是说,程序员假定线程会按照某种特殊的轨迹穿过执行状态空间,忘了一条准则规定:线程化的程序必须对任何可行的轨迹线都正确工作。
- 消除方法:动态的为每个整数ID分配一个独立的块,并且传递给线程例程一个指向这个块的指针
死锁
-
死锁:一组线程被阻塞了,等待一个永远也不会为真的条件。
-
程序员使用P和V操作顺序不当,以至于两个信号量的禁止区域重叠。
-
重叠的禁止区域引起了一组称为死锁区域的状态。
-
死锁是一个相当难的问题,因为它是不可预测的。
-
互斥锁加锁顺序规则:如果对于程序中每对互斥锁(s,t),给所有的锁分配一个全序,每个线程按照这个顺序来请求锁,并且按照逆序来释放,这个程序就是无死锁的。
-
程序首先定义了一个宏
PTHREAD_MUTEX_INITIALIZER来静态初始化互斥锁。先创建tidA线程后运行doit函数,利用互斥锁锁定资源,进行计数,执行完毕后解锁。后创建tidB,与tidA交替执行。由于定义的NLOOP值为5000,所以程序最后的输出值为10000.程序的最后还需要分别回收tidA和tidB的资源。 -
相对于前一个实例,这个代码中加了“互斥锁”(Mutex),在其中一个线程(获得锁)执行时,另一个(未获得)只能等待,所以产生了不同于
count.c的输出效果。
本周结对学习情况
- 12.4.1 线程存储器模型
1、每个线程和其他线程一起共享进程上下文的剩余部分。包括整个用户虚拟地址空间,是由只读文本、读/写数据、堆以及所有的共享库代码和数据区域组成的。线程也共享同样的打开文件的集合。
2、任何线程都可以访问共享虚拟存储器的任意位置。寄存器是从不共享的,而虚拟存储器总是共享的。 - 12.4.2 将变量映射到存储器
1、全局变量:虚拟存储器的读/写区域只会包含每个全局变量的一个实例。
2、本地自动变量:定义在函数内部但没有static属性的变量。
3、本地静态变量:定义在函数内部并有static属性的变量。 - 12.4.3 共享变量
变量v是共享的,当且仅当它的一个实例被一个以上的线程引用。
其他(感悟、思考等,可选)
- 并发是一个之前没有见过的不同的机制,说没见过也不可能,我们使用的任何一个操作系统,哪个是只能在一个时间段上运行一个程序吗,都是可以重叠的,而经过本章节的学习,从程序级的角度了解到了并发,并进行了实践,这就是对书本理论的一个巩固。
- 但感觉自己还是没有太弄懂。
课下作业 -2
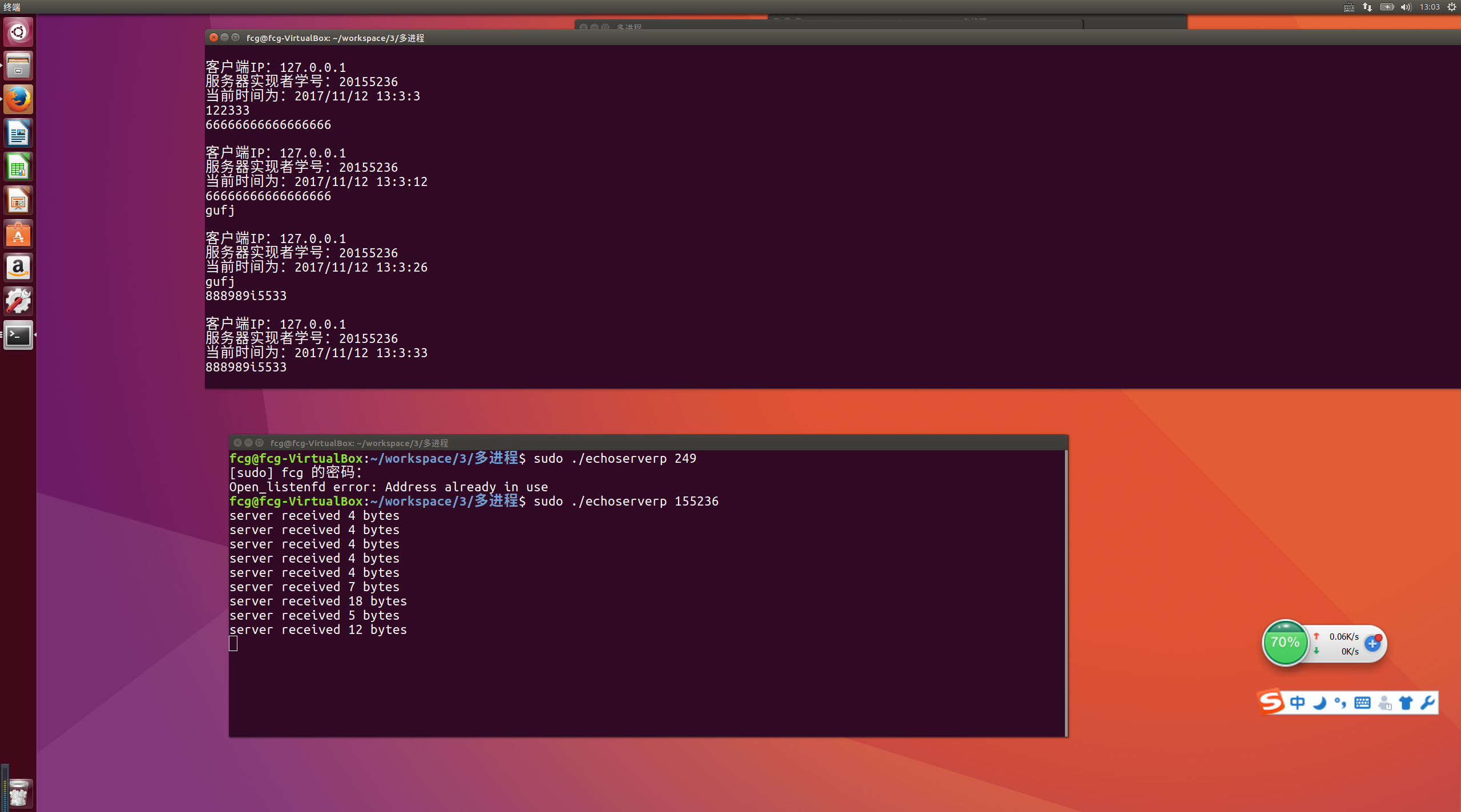
把课上练习3的daytime服务器分别用多进程和多线程实现成并发服务器并测试
在同一个时间里,同一个计算机系统中如果允许两个或两个以上的进程处于运行状态,这便是多任务。现代的操作系统几乎都是多任务操作系统,能够同时管理多个进程的运行。多任务带来的好处是明显的,比如你可以边听mp3边上网,与此同时甚至可以将下载的文档打印出来,而这些任务之间丝毫不会相互干扰。那么这里就涉及到并行的问题,俗话说,一心不能二用,这对计算机也一样,原则上一个CPU只能分配给一个进程,以便运行这个进程。我们通常使用的计算机中只有一个CPU,也就是说只有一颗心,要让它一心多用,同时运行多个进程,就必须使用并发技术。实现并发技术相当复杂,最容易理解的是“时间片轮转进程调度算法”,它的思想简单介绍如下:在操作系统的管理下,所有正在运行的进程轮流使用CPU,每个进程允许占用CPU的时间非常短(比如10毫秒),这样用户根本感觉不出来CPU是在轮流为多个进程服务,就好象所有的进程都在不间断地运行一样。但实际上在任何一个时间内有且仅有一个进程占有CPU。如果一台计算机有多个CPU,情况就不同了,如果进程数小于CPU数,则不同的进程可以分配给不同的CPU来运行,这样,多个进程就是真正同时运行的,这便是并行。但如果进程数大于CPU数,则仍然需要使用并发技术。在Windows中,进行CPU分配是以线程为单位的,一个进程可能由多个线程组成,这时情况更加复杂,但简单地说,有如下关系:
- 总线程数<= CPU数量:并行运行
- 总线程数 > CPU数量:并发运行
- 并行运行的效率显然高于并发运行,所以在多CPU的计算机中,多任务的效率比较高。但是,如果在多CPU计算机中只运行一个进程(线程),就不能发挥多CPU的优势。这里涉及到多任务操作系统的问题,多任务操作系统(如Windows)基本原理是:操作系统将CPU的时间片分配给多个线程,每个线程在操作系统指定的时间片内完成(注意,这里的多个线程是分属于不同进程的).操作系统不断的从一个线程的执行切换到另一个线程的执行,如此往复,宏观上看来,就好像是多个线程在一起执行.由于这多个线程分属于不同的进程,因此在我们看来,就好像是多个进程在同时执行,这样就实现了多任务。
从书上找到相关代码:
1.
#include "csapp.h"
void echo(int connfd);
int main(int argc, char **argv)
{
int listenfd, connfd, port, clientlen;
struct sockaddr_in clientaddr;
struct hostent *hp;
char *haddrp;
if (argc != 2) {
fprintf(stderr, "usage: %s <port>
", argv[0]);
exit(0);
}
port = atoi(argv[1]);
listenfd = Open_listenfd(port);
while (1) {
clientlen = sizeof(clientaddr);
connfd = Accept(listenfd, (SA *)&clientaddr, &clientlen);
/* determine the domain name and IP address of the client */
hp = Gethostbyaddr((const char *)&clientaddr.sin_addr.s_addr,
sizeof(clientaddr.sin_addr.s_addr), AF_INET);
haddrp = inet_ntoa(clientaddr.sin_addr);
printf("server connected to %s (%s)
", hp->h_name, haddrp);
echo(connfd);
Close(connfd);
}
exit(0);
} // sever
#include "csapp.h"
int main(int argc, char **argv)
{
int clientfd, port;
char *host, buf[MAXLINE];
rio_t rio;
if (argc != 3) {
fprintf(stderr, "usage: %s <host> <port>
", argv[0]);
exit(0);
}
host = argv[1];
port = atoi(argv[2]);
clientfd = Open_clientfd(host, port);
Rio_readinitb(&rio, clientfd);
while (Fgets(buf, MAXLINE, stdin) != NULL) {
Rio_writen(clientfd, buf, strlen(buf));
Rio_readlineb(&rio, buf, MAXLINE);
Fputs(buf, stdout);
}
Close(clientfd);
exit(0);
} // client
/* $end echoclientmain */
并做一些修改。
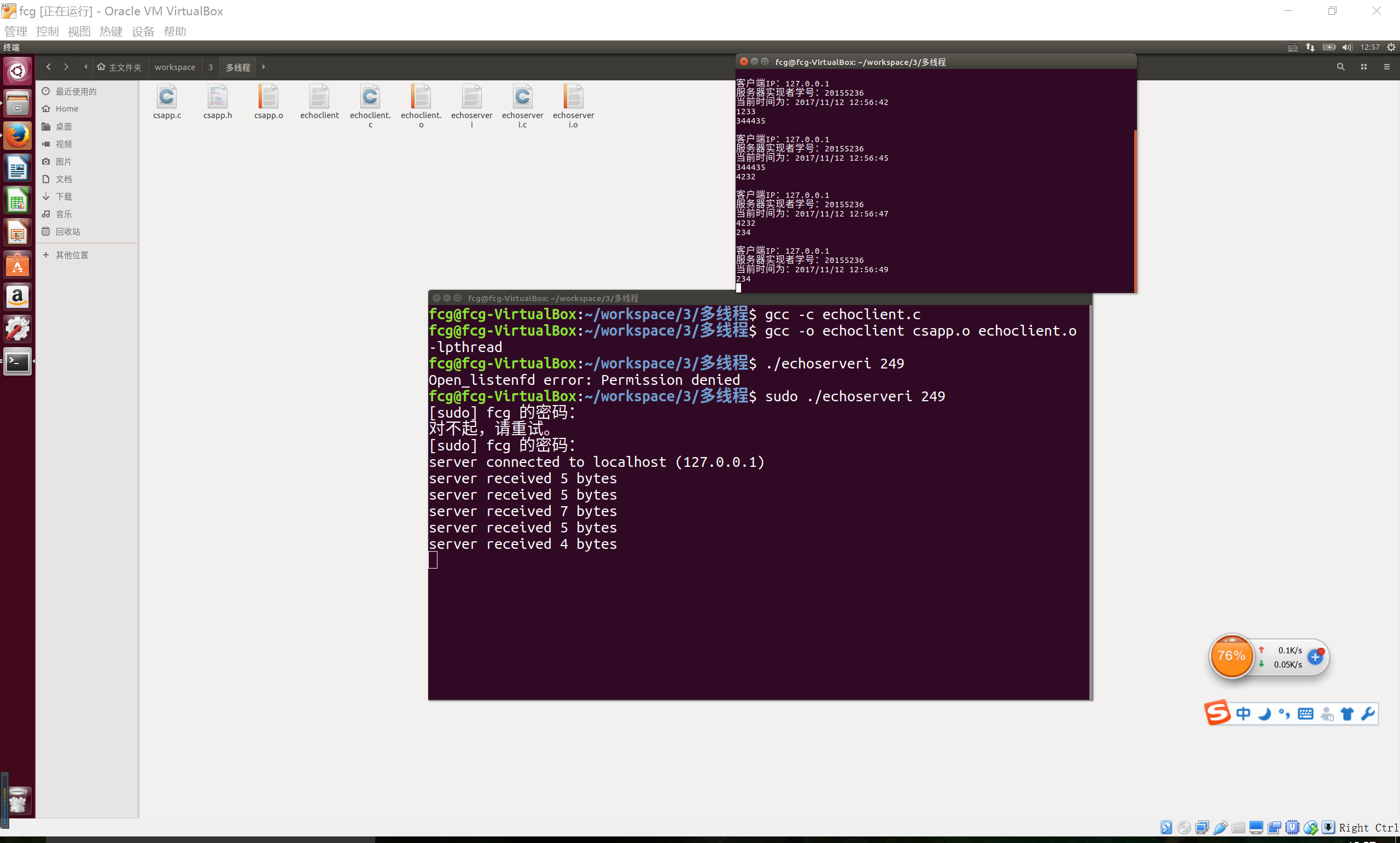
我们分别创建两个文件夹,多进程和多线程,先编译。
gcc -c echoclient.c
gcc -o echoclient csapp.o echoclient.o -lpthread
别忘了要输入自己的IP,和端口号,如下图:
同理,在另一个文件夹中,做如下工作。