什么是仿射变换?
-
一个任意的仿射变换都能表示为 乘以一个矩阵 (线性变换) 接着再 加上一个向量 (平移).
-
综上所述, 我们能够用仿射变换来表示:
- 旋转 (线性变换)
- 平移 (向量加)
- 缩放操作 (线性变换)
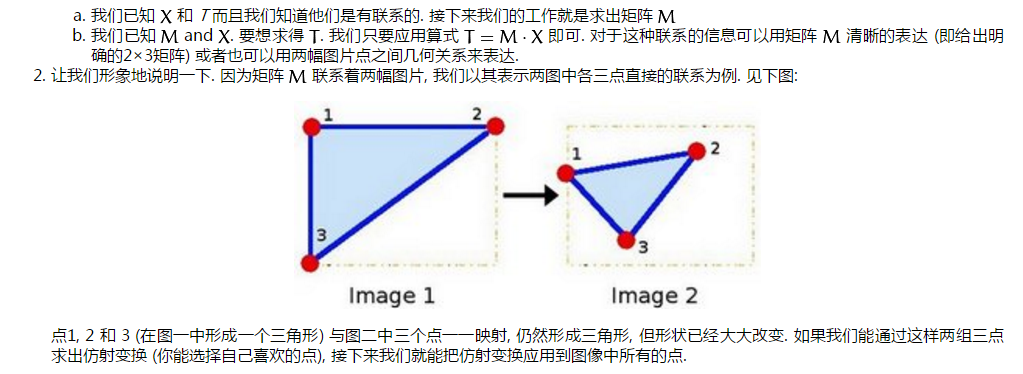
你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的 关系 .
我们通常使用  矩阵来表示仿射变换.
矩阵来表示仿射变换.
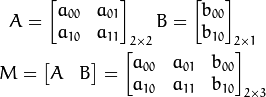
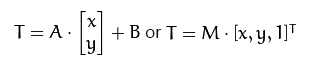
考虑到我们要使用矩阵  和
和  对二维向量
对二维向量  做变换, 所以也能表示为下列形式:
做变换, 所以也能表示为下列形式:
如何求怎样才能求得一个仿射变换?



实现代码:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
using namespace cv;
using namespace std;
/// 全局变量
char* source_window = "Source image";
char* warp_window = "Warp";
char* warp_rotate_window = "Warp + Rotate";
/** @function main */
int main(int argc, char** argv)
{
Point2f srcTri[3];
Point2f dstTri[3];
Mat rot_mat(2, 3, CV_32FC1);
Mat warp_mat(2, 3, CV_32FC1);
Mat src, warp_dst, warp_rotate_dst;
/// 加载源图像
src = imread("E:\VS2015Opencv\vs2015\project\picture\03.jpg", 1);
/// 设置目标图像的大小和类型与源图像一致
warp_dst = Mat::zeros(src.rows, src.cols, src.type());
/// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1);
dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);
dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);
dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7);
/// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri);
/// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size());
/** 对图像扭曲后再旋转 */
/// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);
double angle = -50.0;
double scale = 0.6;
/// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale);
/// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());
/// 显示结果
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src);
namedWindow(warp_window, CV_WINDOW_AUTOSIZE);
imshow(warp_window, warp_dst);
namedWindow(warp_rotate_window, CV_WINDOW_AUTOSIZE);
imshow(warp_rotate_window, warp_rotate_dst);
/// 等待用户按任意按键退出程序
waitKey(0);
return 0;
}
结果如下:

代码解析:
仿射变换: 正如上文所说, 我们需要源图像和目标图像上分别一一映射的三个点来定义仿射变换:
/// 设置源图像和目标图像上的三组点以计算仿射变换 srcTri[0] = Point2f(0, 0); srcTri[1] = Point2f(src.cols - 1, 0); srcTri[2] = Point2f(0, src.rows - 1); dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33); dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25); dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7); /// 求得仿射变换 warp_mat = getAffineTransform(srcTri, dstTri);
我们获得了用以描述仿射变换的 矩阵 (在这里是 warp_mat)
将刚刚求得的仿射变换应用到源图像
warpAffine()函数有以下参数:
- src: 输入源图像
- warp_dst: 输出图像
- warp_mat: 仿射变换矩阵
- warp_dst.size(): 输出图像的尺寸
/// 对源图像应用上面求得的仿射变换 warpAffine(src, warp_dst, warp_mat, warp_dst.size());
旋转: 想要旋转一幅图像, 你需要两个参数:
- 旋转图像所要围绕的中心
- 旋转的角度. 在OpenCV中正角度是逆时针的
- 可选择: 缩放因子
我们通过下面的代码来定义这些参数:
再利用OpenCV函数 getRotationMatrix2D 来获得旋转矩阵, 这个函数返回一个 矩阵 (这里是 rot_mat)
最后把旋转应用到仿射变换的输出.
/// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵 Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2); double angle = -50.0; double scale = 0.6; /// 通过上面的旋转细节信息求得旋转矩阵 rot_mat = getRotationMatrix2D(center, angle, scale); /// 旋转已扭曲图像 warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());