


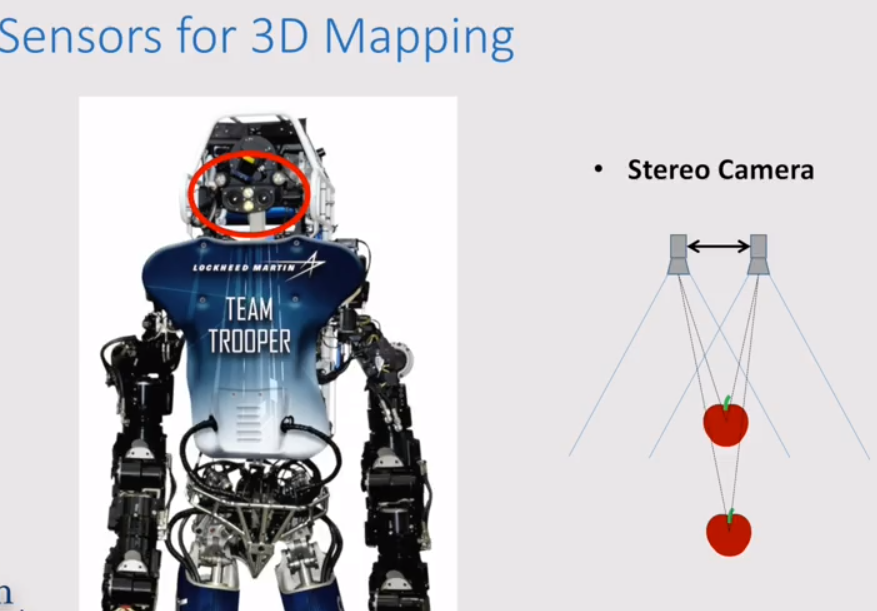
building a semantic map requires
advanced object recognition techniques which go beyond our scope.



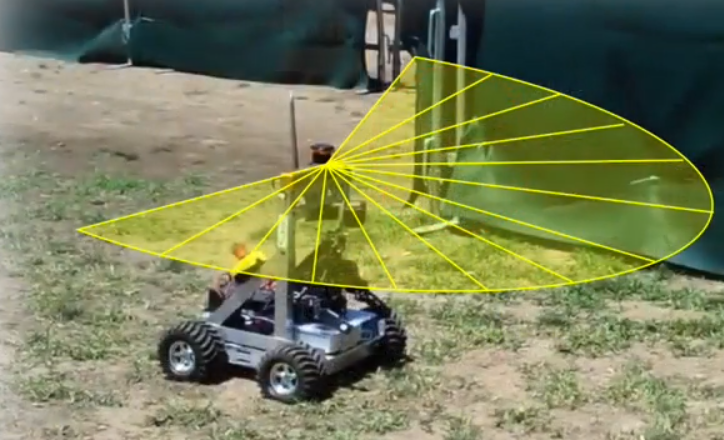
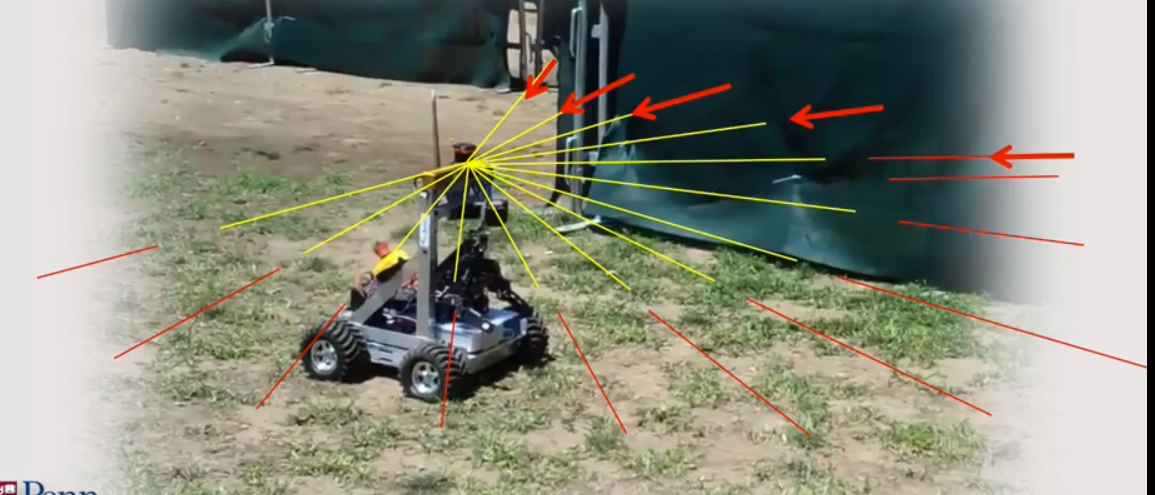
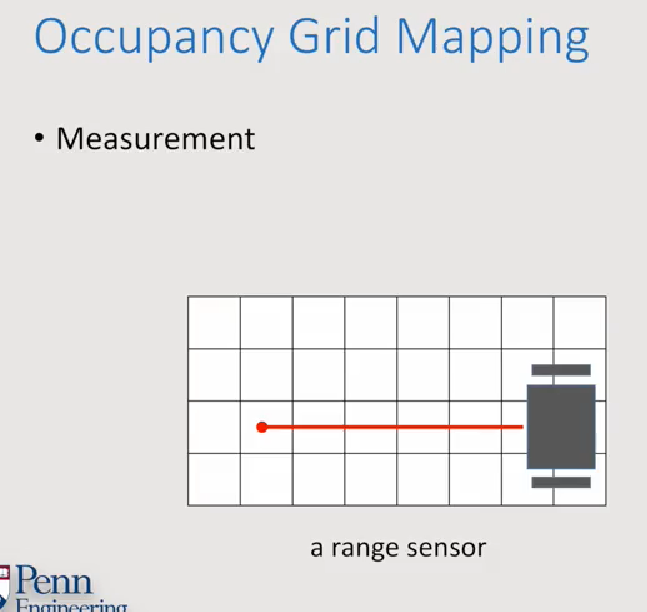
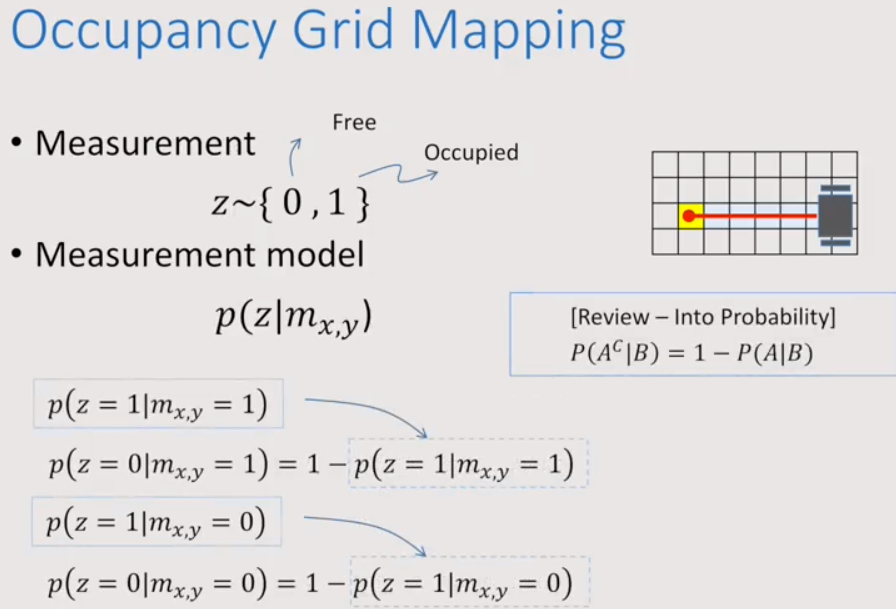
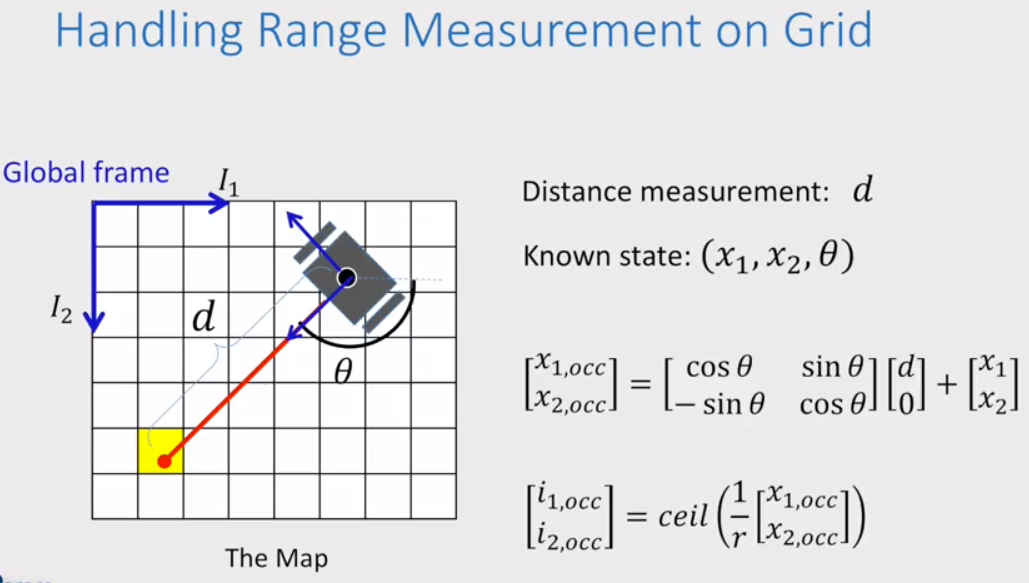
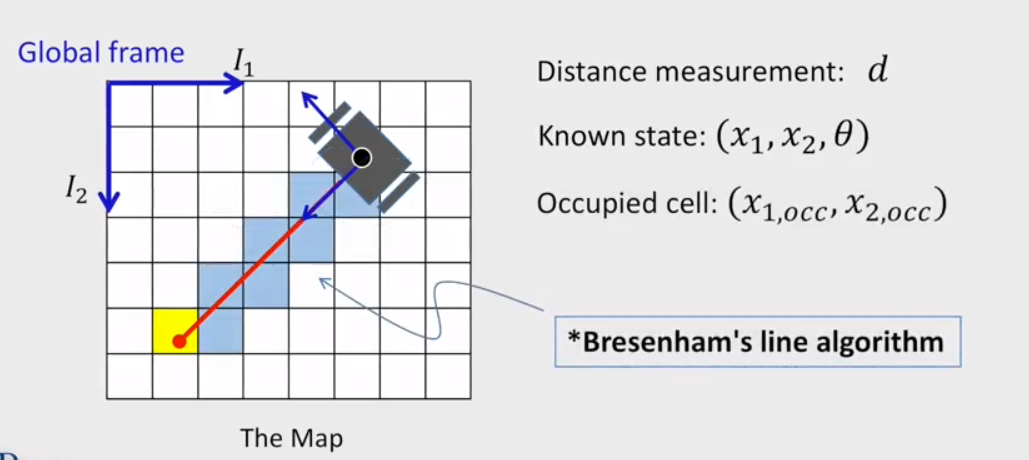
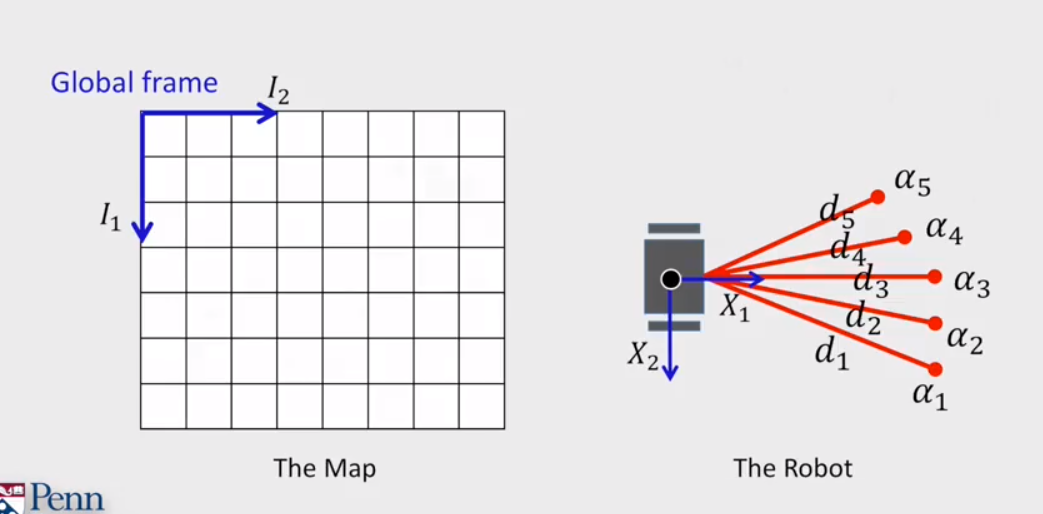
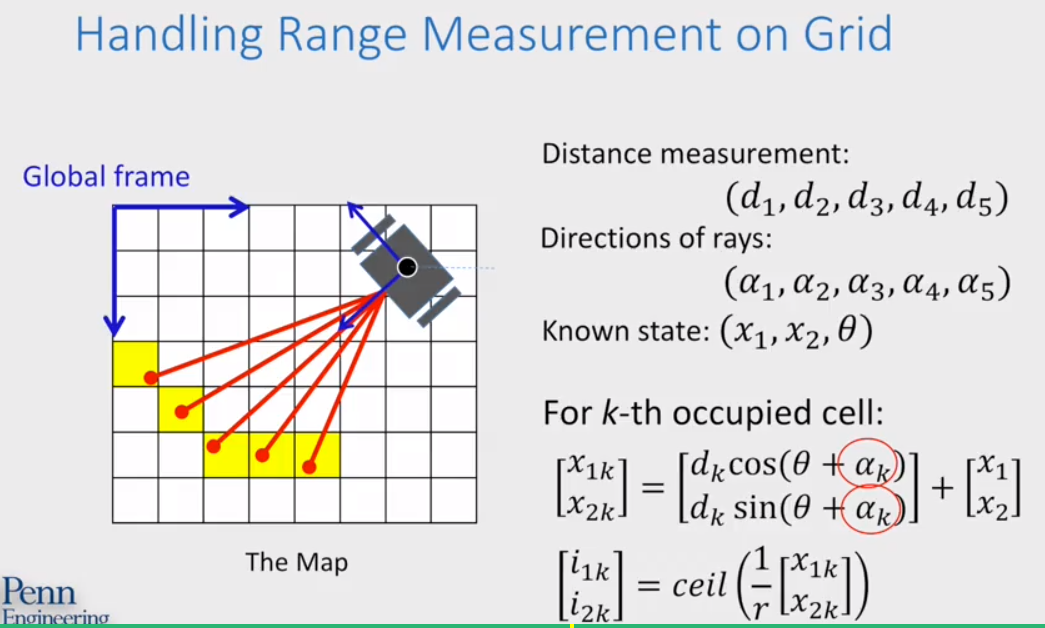
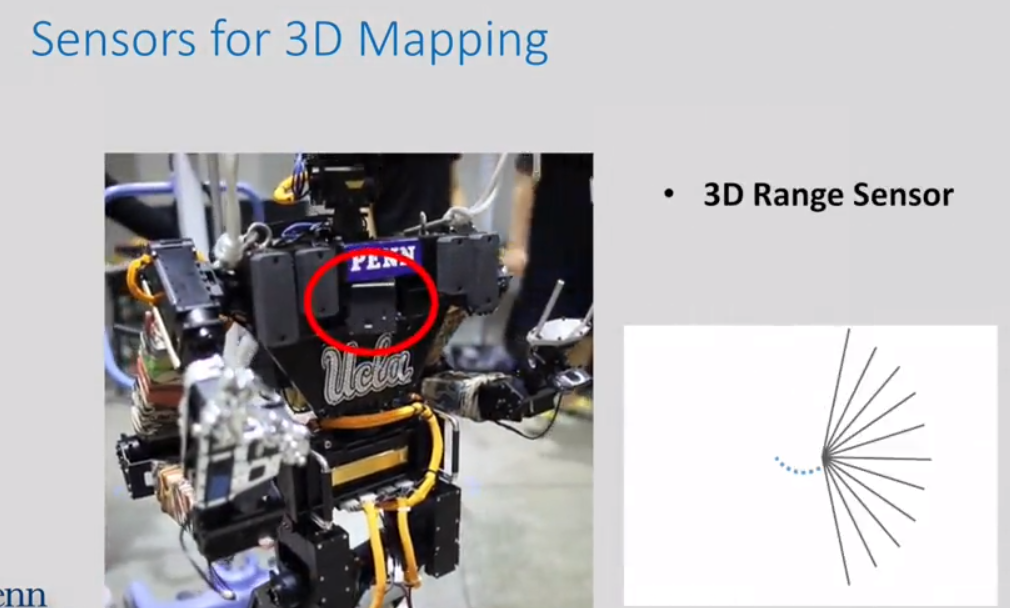
But we are most interested in the range sensor it has on the top.








https://www.cnblogs.com/flash3d/archive/2012/01/30/2332121.html







https://www.quora.com/Why-do-self-driving-cars-use-LIDAR-instead-of-depth-cameras-like-Kinect
https://www.zhihu.com/question/28749424



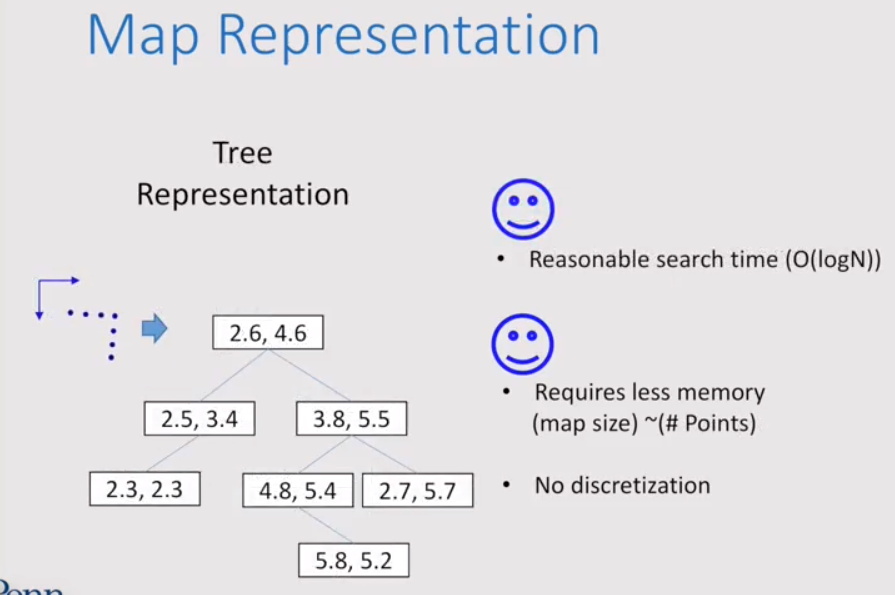
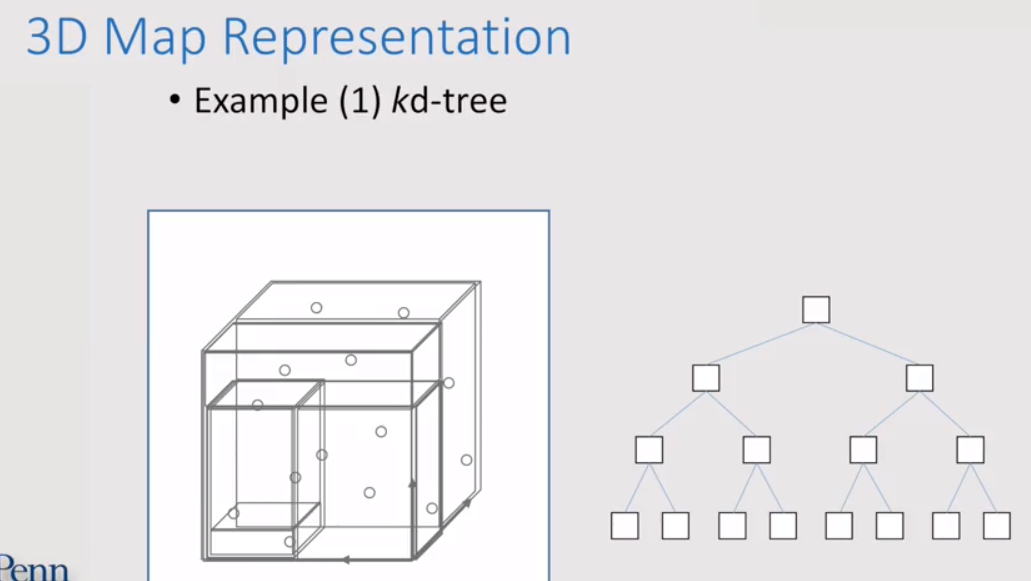
k-d tree算法
https://www.cnblogs.com/eyeszjwang/articles/2429382.html