并发编程
摘要
- 本章论述了并发编程,介绍了并行计算的概念,指出了并行计算的重要性;
- 比较了顺序算法与并行算法,以及并行性与并发性;
- 解释了线程的原理及其相对于进程的优势;
- 通过示例介绍了 Pthread 中的线程操作,包括线程管理函数,互斥量、连接、条件变量和屏障等线程同步工具;
- 通过具体示例演示了如何使用线程进行并发编程,包括矩阵计算、快速排序和用并发线程求解线性方程组等方法;
- 解释了死锁问题,并说明了如何防止并发程序中的死锁问题;
- 讨论了信号量,并论证了它们相对于条件变量的优点。
并行性和并发性
- 真正的并行执行只能在多个处理组件的系统中实现,比如多处理器或多核系统。
- 在单CPU系统中,并发性是通过多任务处理实现的。
线程
- 线程的原理
- 在内核模式下,各进程在唯一地址空间上执行,与其他进程是分开的;
- 每个进程都是一个独立单元,只有一个执行路径;
- 线程是某进程同一地址空间上的独立执行单元,如果只有一个主线程,那么进程和线程并没有什么本质区别。
- 线程的优点
- 线程创建和切换速度更快。
- 线程的响应速度更快。
- 线程更适合并行计算
- 线程的缺点
- 由于地址空间共享,线程需要来自用户的明确同步。
- 许多库函数可能对线程不安全。
- 在单CPU系统上,使用线程解决间题实际上要比使用顺序程序慢,这是由在运行时创建线程和切换上下文的系统开销造成的。
- 线程操作
- 线程可在内核模式或用户模式下执行。
- 在用户模式下,线程在进程的相同地址空间中执行,但每个线程都有自己的执行堆栈。
- 线程是独立的执行单元,可根据操作系统内核的调度策略,对内核进行系统调用,变为桂起激活以继续执行等。
- 为了利用线程的共享地址空间,操作系统内核的调度策略可能会优先选择同一进程中的线程,而不是不同进程中的线程。
- 线程管理函数
- Pthread库提供了用于线程管理的以下API
pthread_create(thread, attr, function, arg): create thread pthread_exit(status):terminate thread pthread_cancel(thread) : cancel thread pthread_attr_init(attr) : initialize thread attributes pthread_attr_destroy(attr): destroy thread attribute - 创建线程
- 使用pthread_create()函数创建线程。
int pthread_create (pthread_t *pthread_id,pthread_attr_t *attr,void * (*func) (void *), void *arg); - 其中,attr最复杂,其使用步骤为
- 定义一个pthread属性变址
pt:hread_attr_tattr。 - 用
pthread_attr_init(&attr)初始化屈性变掀。 - 设置属性变垃并在
pthread_create()调用中使用。 - 必要时,通过
pthread_attr_destroy(&attr)释放attr资源。
- 定义一个pthread属性变址
- 使用pthread_create()函数创建线程。
- 线程终止
- 线程函数结束后,线程即终止,或者,线程可以调用函数
int pthraad_exit {void *status)进行显式终止,其中状态是线程的退出状态。
- 线程函数结束后,线程即终止,或者,线程可以调用函数
- 线程连接
- 一个线程可以等待另一个线程的终止, 通过:
int pthread_join (pthread_t thread, void **status__ptr); - 终止线程的退出状态以status_ptr返回。
- 一个线程可以等待另一个线程的终止, 通过:
- Pthread库提供了用于线程管理的以下API
线程同步
-
当多个线程试图修改同一共享变量或数据结构时,如果修改结果取决于线程的执行顺序,则称之为竞态条件。
-
互斥量
- 在 Pthread中,锁被称为互斥量,意思是相互排斥。
- 互斥变呈是用
ptbread_mutex_t类型声明的在使,用之前必须对它们进行初始化。- 有两种方法可以初始化互斥址:
- 静态方法:
pthreaa—mutex_t m = PTHREAD_MUTEX_INITIALIZER,定义互斥量 m, 并使用默认属性对其进行初始化。 - 动态方法,使用 pthread_ mutex _init() 函数
- 静态方法:
- 有两种方法可以初始化互斥址:
- 线程通过互斥量来保护共享数据对象
-
死锁预防
- 死锁是一种状态,在这种状态下,许多执行实体相互等待,因此都无法继续下去。
- 死锁预防,试图在设计并行算法时防止死锁的发生。
- 一种简单的死锁预防方法是对互斥量进行排序,并确保每个线程只在一个方向请求互斥量,这样请求序列中就不会有循环。
-
条件变量
- 条件变量提供了一种线程协作的方法。
- 在Pthread中,使用类型
pthread_cond_t来声明条件变量,而且必须在使用前进行初始化。 - 与互斥变量一样,条件变量也可以通过两种方法进行初始化。
- 静态方法:
pthread_cond_t con= PTHREAD_COND_INITIALIZER;定义一个条件变屾con,并使用默认属性对其进行初始化。 - 动态方法:使用
pthread_cond_init()函数,可通过attr参数设置条件变量。为简便起见,我们总是使用NULLattr参数作为默认属性。
- 静态方法:
-
信号量
- 信号量是进程同步的一般机制。
- 信号量是一种数据结构
struct sem{ int value; struct process *queue }s;
问题与解决
- 并行性和并发性的区别与联系
- 并发的实质是一个物理CPU(也可以多个物理CPU) 在若干道程序之间多路复用;
- 所有的并发处理都有排队等候,唤醒,执行至少三个这样的步骤;
- 并发性,又称共行性,是指能处理多个同时性活动的能力;
- 并发性是对有限物理资源强制行使多用户共享以提高效率。
- 并行性指两个或两个以上事件或活动在同一时刻发生。在多道程序环境下,并行性使多个程序同一时刻可在不同CPU上同时执行。
- 并行是指同时发生的两个并发事件,具有并发的含义,而并发则不一定并行,也亦是说并发事件之间不一定要同一时刻发生。
- 并发的实质是一个物理CPU(也可以多个物理CPU) 在若干道程序之间多路复用;
实践
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
typedef struct{
int upperbound;
int lowerbound;
}PARM;
#define N 10
int a[N]={5,1,6,4,7,2,9,8,0,3};// unsorted data
int print(){//print current a[] contents
int i;
printf("[");
for(i=0;i<N;i++)
printf("%d ",a[i]);
printf("]
");
}
void *Qsort(void *aptr){
PARM *ap, aleft, aright;
int pivot, pivotIndex,left, right,temp;
int upperbound,lowerbound;
pthread_t me,leftThread,rightThread;
me = pthread_self();
ap =(PARM *)aptr;
upperbound = ap->upperbound;
lowerbound = ap->lowerbound;
pivot = a[upperbound];//pick low pivot value
left = lowerbound - 1;//scan index from left side
right = upperbound;//scan index from right side
if(lowerbound >= upperbound)
pthread_exit (NULL);
while(left < right){//partition loop
do{left++;} while (a[left] < pivot);
do{right--;}while(a[right]>pivot);
if (left < right ) {
temp = a[left];a[left]=a[right];a[right] = temp;
}
}
print();
pivotIndex = left;//put pivot back
temp = a[pivotIndex] ;
a[pivotIndex] = pivot;
a[upperbound] = temp;
//start the "recursive threads"
aleft.upperbound = pivotIndex - 1;
aleft.lowerbound = lowerbound;
aright.upperbound = upperbound;
aright.lowerbound = pivotIndex + 1;
printf("%lu: create left and right threadsln", me) ;
pthread_create(&leftThread,NULL,Qsort,(void * )&aleft);
pthread_create(&rightThread,NULL,Qsort,(void *)&aright);
//wait for left and right threads to finish
pthread_join(leftThread,NULL);
pthread_join(rightThread, NULL);
printf("%lu: joined with left & right threads
",me);
}
int main(int argc, char *argv[]){
PARM arg;
int i, *array;
pthread_t me,thread;
me = pthread_self( );
printf("main %lu: unsorted array = ", me);
print( ) ;
arg.upperbound = N-1;
arg. lowerbound = 0 ;
printf("main %lu create a thread to do QS
" , me);
pthread_create(&thread,NULL,Qsort,(void * ) &arg);//wait for Qs thread to finish
pthread_join(thread,NULL);
printf ("main %lu sorted array = ", me);
print () ;
}
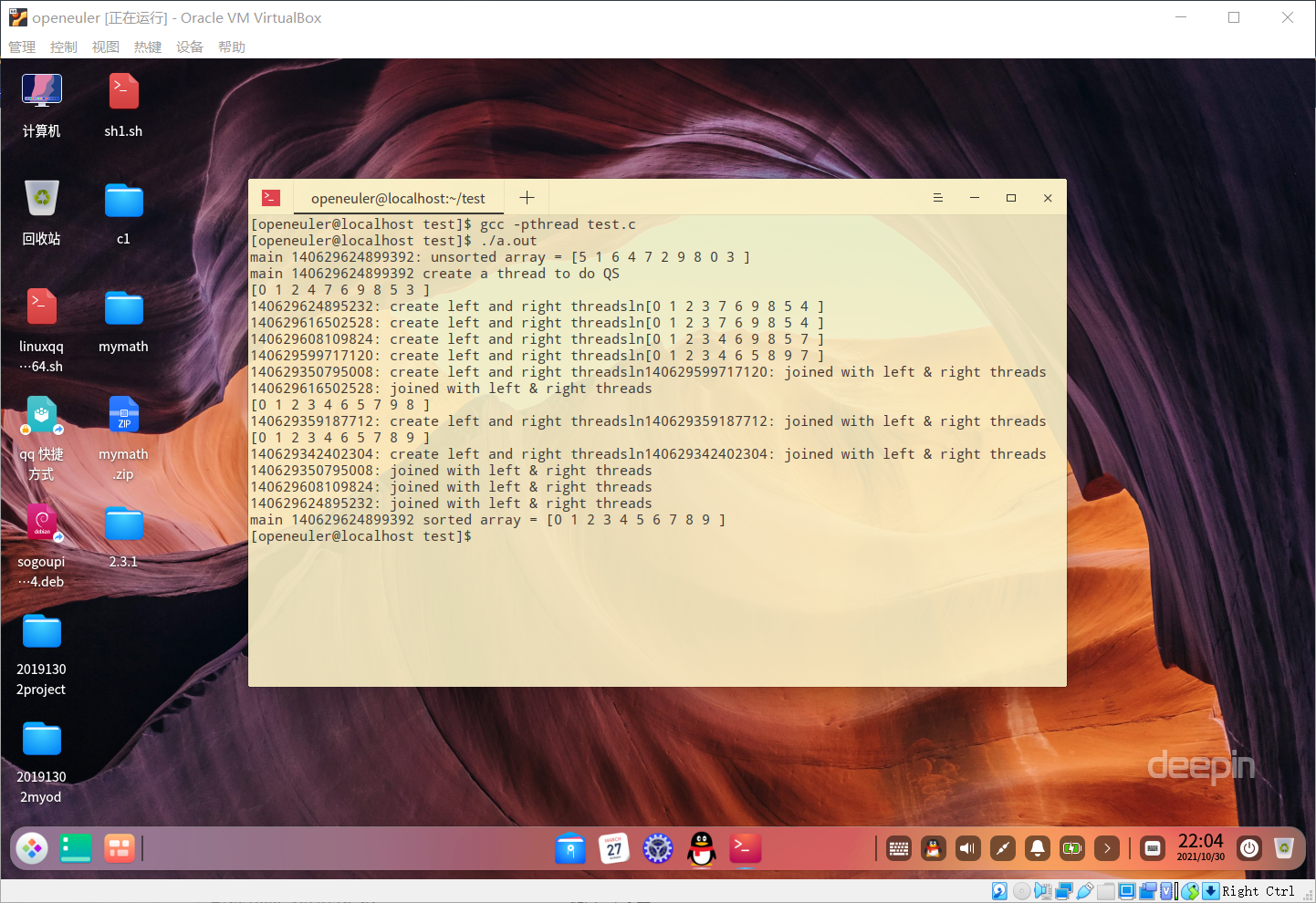
- 运行结果