介绍
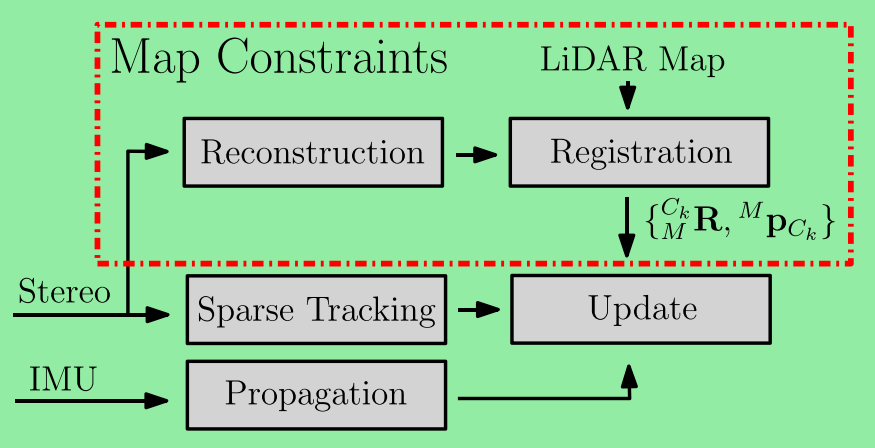
提出了一个低代价双目视觉惯导定位系统,实现了基于多状态约束下的卡尔曼滤波器(MSCKF)VIO,采用了先验雷达地图。除了稀疏的视觉特征,雷达地图与半稠密的点云也通过紧耦合的MSCKF进行更新,进而可以纠正漂移。点云和视觉之间的跨模态限制对VIO系统有改善作用。
总之就是提出了VIO状态估计器,其中点云地图提供了先验,考虑到计算效率,采用MSCKF,实现在线定位,仅仅维护一个固定大小的窗口,优化IMU位姿,窗口中不保留特征。同时生成半稠密地图,产生视觉点云,该点云能在雷达地图中进行配准,结果作为相机位姿的全局测量,和视觉稀疏特征以及惯导测量进行紧融合。雷达地图先验通过和视觉半稠密点云以及NDT方法构建。纠正仅VIO偏差,提供6自由度的实时位姿估计。
视觉惯导状态估计
A.状态向量
估计的状态量见公式(1),主要包括全局参考系到第(k)时刻的IMU参考系之间的旋转量、陀螺仪和加速度计偏差、IMU在全局参考系下的位置(这个是不是可以代替平移)、速度、雷达地图和全局参考系之间的位姿变换(旋转+平移),以及一个大小为m帧图像的滑动窗口,维护的状态量是这k帧对应的IMU相对于世界的位姿变换。见公式(2)。状态偏差的定义见公式(3)。状态估计值通过估计值和偏差进行更新,见公式(4)。对于位置和速度更新时直接用加法,位姿量则需要使用四元数乘法。
B.状态传递
状态量和协方差的传递需要对IMU的线加速度和角速度使用IMU运动学进行预积分,见公式(6),参考了文献[30],EKF传递参考了[1]。
C.状态更新
通过将半密集点云与先验激光雷达地图进行配准,将得到一个具有协方差的配准姿态:
-
雷达地图约束:考虑时间(k)时左边相机在地图中的位姿,以该测量作为状态函数,可以通过map---global---IMU---相机求解。状态函数线性化以及雅克比矩阵的求解见式(9)-(16)。直接可以使用文献[31]中的EKF进行更新。
-
视觉特征测量:追踪一些稀疏的特征点,采用滑动窗口。如果特征丢失或者追踪时间过长,则三角化到地图点,并且采用BA优化。成功优化的特征点将通过马氏距离测试,并使用MSCKF更新。稀疏特征点提供短期定位,先验地图可以减小长期定位的漂移。
视觉处理
视觉处理过程主要包括两个方面:稀疏特征点的追踪以及与半稠密视觉点云与雷达地图的配准。这两个过程独立进行,双目构建半稠密点云,和先验雷达地图进行配准,并给出地图和camera之间的变换。
半稠密重建
作者发现对于雷达地图来说,使用视觉重建的点云与其进行陪准时,结构化的表面如平面的配准效果较好,而稀疏重建主要由边和角落对应的高梯度的点组成,因此作者使用半稠密重建,进行 配准。论文中选取一些关键帧进行重建,关键帧的选取主要看距离以及姿态变化大小,保证关键帧能覆盖较大的空间区域,且帧之间的重合区域较小,半稠密重建可以参考最近的神经网络方法,见文献[33]。使用窗口维护关键帧(增加约束,便于匹配),对于关键帧先使用双目块匹配计算深度图,即最小化SAD距离,与其他方法相比[34],[35],传统双目块匹配能保证计算效率,后面还要用其他关键帧进行深度优化。
深度对应匹配
在计算窗口中的关键帧已经通过MSCKF估计出位姿,将关键帧的深度图投影到其他的帧上,计算相似性。深度匹配过程如图4所示,将其他帧的点投到第k帧上,如果像素能匹配上,将点及其深度添加到观测集合上,对于每个要和(j)帧匹配的像素,都要做一个并存测试:
1)两个像素值小于某个阈值
2)两个像素处的梯度小于某个阈值
3)投影过来的深度值相差不能超过阈值
投影时像素位置需要离散化,为了减小误差,投影的是被投影点周围的2*2的块,如果像素块通过了测试,则将投影点以及深度加入集合(P_j(u_n))上。对于窗口中的每个关键帧都进行该操作,使用观测到的信息对每一帧的点云进行优化,去除外点。如果某个像素的观测点太少,则被认为是外点,如果存在很多观测点,则深度取这些观测点的平均值,该方法使得点云的质量很高,噪声较少。
点云 Assembly
在对每一帧的深度估计进行约束后,需要将每一帧点云投影到当前帧上(参考帧),由于半稠密点云数量太多,作者采用了第二个线程,提供了先验雷达地图约束。只要三个关键帧的窗口,超过半米以及30度的位姿变化就可以很好地约束点云。
NDT点云配准
在参考帧中重建了半稠密点云后,和雷达地图进行配准。NDT方法既保证了精确度也有足够的效率。NDT使用高斯分布来模拟点云,作者采用了P2D方法,实现了源点云到目标点云的配准,求出相对位姿,优化函数见公式(22)。Hessian矩阵的求解见M. Magnusson 的博士论文61页。注意PCL库中的P2D函数使用欧拉角表示姿态,作者使用了四元数参数,需要一个协方差矩阵进行误差状态传递时的转换。
为了降低噪声的影响,文中还采用了以下策略:
1)在计算NDT的Hessian矩阵后,计算其最小特征值,保证其大于一定阈值
2)公式(22)的优化函数代价值小于一定阈值
3)NDT集合中内点与源点云内点的比例反映了配准的质量,应该接近于1(这里源点云是不是应该是重建生成的点云)
4)最终的雷达地图先验约束会进行马氏距离测试处理。
未来工作
考虑雷达地图不确定性,将视觉半稠密地图用于更新雷达先验地图。
A
Assembly 怎么翻译
马氏距离测试是什么?基于马氏距离的异常值检测?
点云地图变化不大,视觉特征地图变化大(光照等)
公式(2)上面which do not evolve over time and are used during feature update:
点云也更新么? 深度需要 通过匹配优化