一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 1:
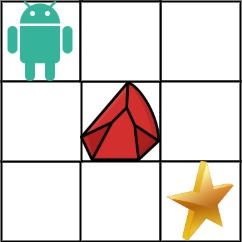
输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:
3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
- 向右 -> 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右 -> 向右
示例 2:
输入:obstacleGrid = [[0,1],[0,0]]
输出:1
提示:
m == obstacleGrid.length
n == obstacleGrid[i].length
1 <= m, n <= 100
obstacleGrid[i][j] 为 0 或 1
来源:力扣(LeetCode)
链接:https://leetcode-cn.com/problems/unique-paths-ii
参考:
python
# 0063.不同路径II
class Solution:
def uniquePathsWithObstacles(self, obstaclesGrid: [[int]]) -> int:
"""
动态规划, 类似62,但要处理障碍
:param obstaclesGrid:
:return:
"""
# 构造dp
row = len(obstaclesGrid)
col = len(obstaclesGrid[0])
dp = [[0 for _ in range(col)] for _ in range(row)]
# 处理障碍
dp[0][0] = 1 if obstaclesGrid[0][0] != 1 else 0
# row1
for i in range(1, col):
if obstaclesGrid[0][i] != 1:
dp[0][i] = dp[0][i-1]
# col1
for j in range(1, row):
if obstaclesGrid[j][0] != 1:
dp[j][0] = dp[j-1][0]
# 遍历
for i in range(1, row):
for j in range(1, col):
if obstaclesGrid[i][j] != 1:
dp[i][j] = dp[i-1][j] + dp[i][j-1]
return dp[-1][-1]
golang
package dynamicPrograming
// 动态规划
func uniquePathsWithObstacles(obstacles [][]int) int {
row, col := len(obstacles), len(obstacles[0])
// 定义dp
dp := make([][]int, row)
for i := range dp {
dp[i] = make([]int, col)
}
// 初始化
for i:=0;i<row;i++ {
if obstacles[i][0] == 1 {
break
}
dp[i][0] = 1
}
for j:=0;j<col;j++ {
if obstacles[0][j] == 1 {
break
}
dp[0][j] = 1
}
// dp遍历
for i:=1;i<row;i++ {
for j:=1;j<col;j++ {
if obstacles[i][j] != 1 {
dp[i][j] = dp[i-1][j] + dp[i][j-1]
}
}
}
return dp[row-1][col-1]
}