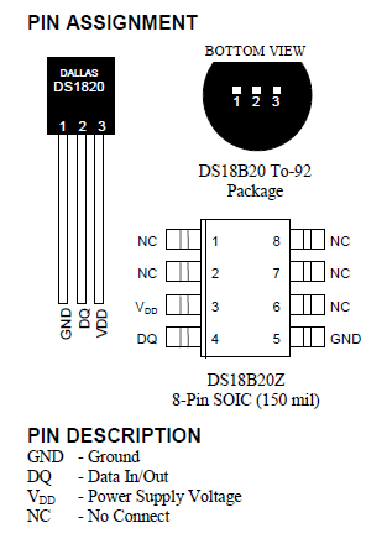
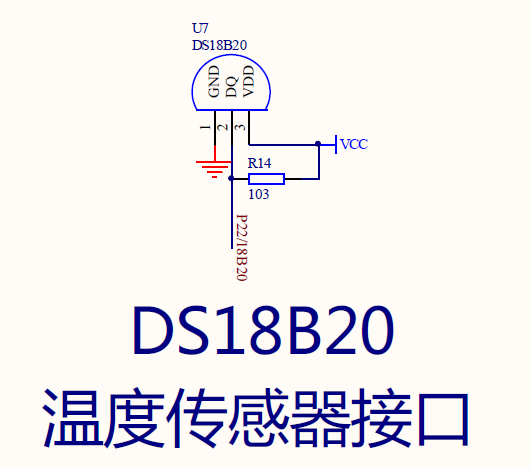
DS18B20特点
通信采用1-Wire接口
每个DS18B20都有唯一的64位序列码储存在板载ROM中
无需外部元件
可从数据线供电,电源范围为3.0V ~ 5.5V。
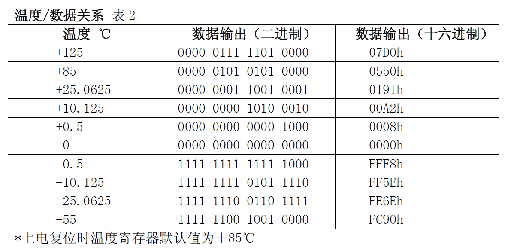
可测量的温度范围在-55℃ ~ +125℃
在-10~+85℃范围内精确度为±0.5℃
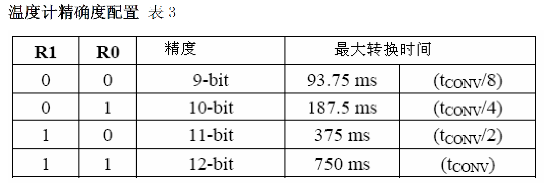
温度计分辨率可设置为9~12位,12位时分辨率对应为0.0625℃
单总线时序
DS18B20采用1-wire Bus所有数据都在一条线上传输,因此单总线协议对时序要求非常严格以确保数据的完整性。
单总线信号类型:复位脉冲、存在脉冲、写0、写1、读0、读1。所有这些信号除存在脉冲由DS18B20发出的以外其他信号都由总线控制器发出。
数据传输总是从最低有效位开始。
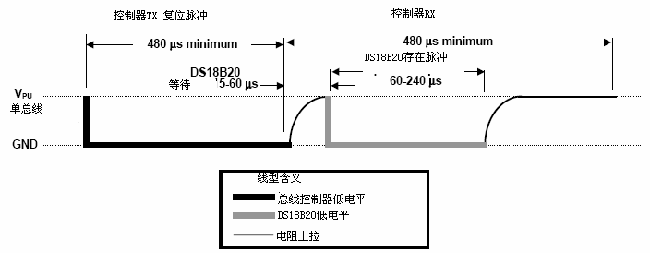
初始化时序
初始化时序里面包含了复位DS18B20和接收DS18B20返回的存在信号。
主机和DS18B20做任何通讯前都需要对其初始化。初始化期间,总线控制器拉低总线并保持480us以上挂在总线上的器件将被复位,然后释放总线,等到15-60us,此时18B20将返回一个60-240us之间的低电平存在信号。
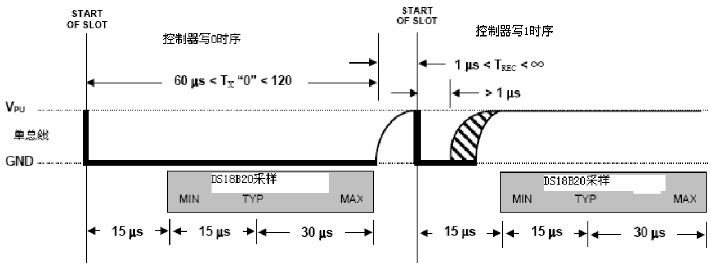
写时序
写时序分为写0时序和写1时序。
总线控制器通过控制单总线高低电平持续时间从而把逻辑1或0写DS18B20中。
总线控制器要产生一个写时序,必须将总线拉低最少1us,产生写0时序时总线必须保持低电平60~120us之间,然后释放总线,产生写1时序时在总线产生写时序后的15us内允许把总线拉高。注意:2次写周期之间至少间隔1us
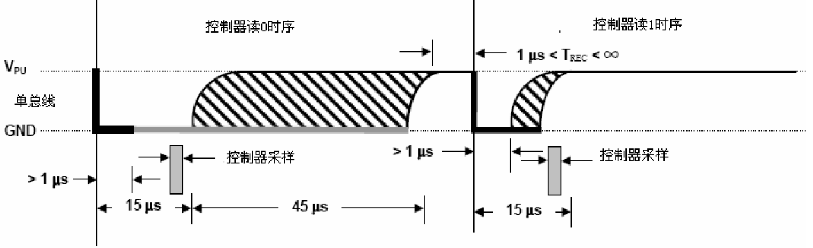
读时序
读时序分为读0时序和读1时序。
总线控制器通过读取由DS18B20控制的总线高低电平接收DS18B20数据。
总线控制器要产生一个读时序,必须将总线拉低至少1us,然后释放总线,在读信号开始后15us内总线控制器采样总线数据,读一位数据至少保持在60us以上。注意:2次读周期之间至少间隔1us
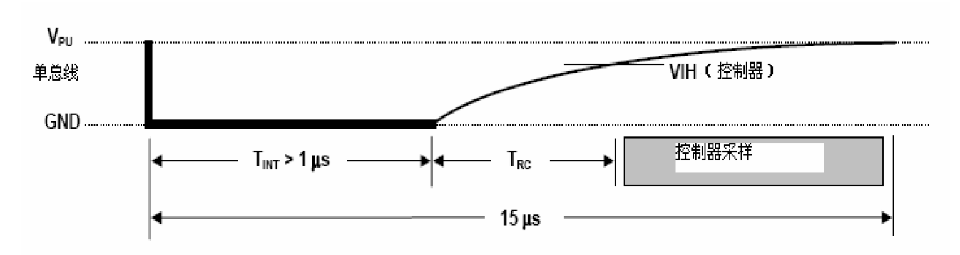
读1详细时序图
DS18B20暂存器

温度寄存器图表

配置寄存器图表

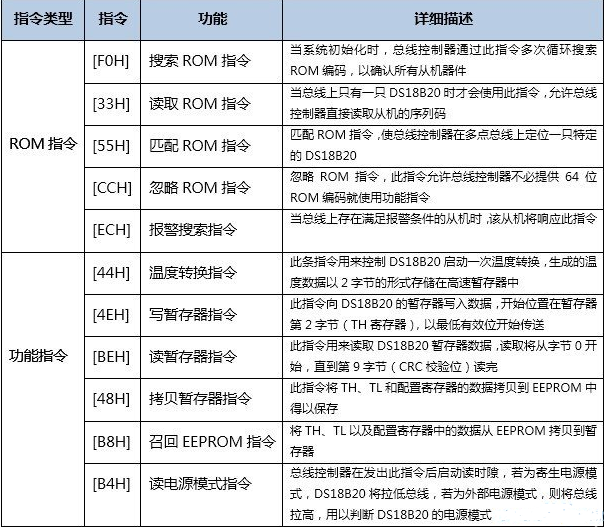
部分ROM指令及功能指令
忽略ROM指令(CCh)
这条指令允许总线控制器不用提供64 位ROM 编码就使用功能指令。例如,总线控制器可以先发出一条忽略ROM 指令,然后发出温度转换指令[44h],从而完成温度转换操作。在单点总线(总线上只有一个DS18B20)情况下使用该命令,器件无需发回64 位ROM 编码,从而节省了时间。如果总线上有不止一只从机,若发出忽略ROM指令,由于多只从机同时传送信号,总线上就会发生数据冲突。
温度转换指令(44h)
这条命令用以启动一次温度转换。温度转换指令被执行,产生的温度转换结果数 据以2个字节的形式被存储在高速暂存器中,而后DS18B20保持等待状态。
读暂存器指令(BEh)
这条命令读取暂存器的内容。读取将从字节0 开始,一直进行下去,直到读完暂存器所有字节,如果不想读完所有字节,控制器可以在任何时间发出复位命令来中止 读取。
写暂存器指令(4Eh)
这条命令向DS18B20 的暂存器写入数据,开始位置在TH 寄存器(暂存器的第2 个字节),接下来写入TL 寄存器(暂存器的第3 个字节),最后写入配置寄存器 (暂存器的第4 个字节)
拷贝暂存器指令(48h)
这条命令把TH,TL 和配置寄存器(第2、3、4 字节)的内容拷贝到EEPROM 中。
执行顺序:
(1)初始化
(2)ROM操作指令
(3)DS18B20功能指令、温度转换命令、 读取暂存器命令
#include <reg52.h> #include <intrins.h> #define MAIN_Fosc 11059200UL //宏定义主时钟HZ /*==================================== 自定义类型名 ====================================*/ typedef unsigned char INT8U; typedef unsigned char uchar; typedef unsigned int INT16U; typedef unsigned int uint; /*==================================== 硬件接口位声明 ====================================*/ sbit DS = P2^2; //DS18B20单总线 sbit DU = P2^6; //数码管段选 sbit WE = P2^7; //数码管位选 /*==================================== 共阴极数码管段选码 ====================================*/ uchar code table[]={ //0 1 2 3 4 5 6 7 8 0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, //9 A B C D E F - . 关显示 0x6F, 0x77, 0x7C, 0x39, 0x5E, 0x79, 0x71, 0x40, 0x80, 0x00 }; /*==================================== 数码管位选码 ====================================*/ //第1位 2位 3位 4位 5位 6位 7位 8位 uchar code T_COM[] = {0xfe, 0xfd, 0xfb, 0xf7, 0xef, 0xdf, 0xbf, 0x7f};//数码管位码 /*==================================== 函数:void Delay_Ms(INT16U ms) 参数:ms,毫秒延时形参 描述:12T 51单片机自适应主时钟毫秒级延时函数 ====================================*/ void Delay_Ms(INT16U ms) { INT16U i; do{ i = MAIN_Fosc / 96000; while(--i); //96T per loop }while(--ms); } /*us延时函数,执行一次US--所需6.5us进入一次函数需要11.95us*/ void Delay_us(uchar us) { while(us--); } /*==================================== 函数:void Display(INT16U Value) 参数:Value,显示值 取值0-65535 描述:共阴极数码管显示函数可显示一个字节的数 ====================================*/ void Display(INT16U Value) //注意由于需要显示的数大于一个字节所有形参需为int型 { //------------------------------ DU = 0; //关闭段选 P0 = table[Value/100]; //数码管显示百位 DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[0]; //第一位数码管 WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(3); //------------------------------- DU = 0; P0 = table[Value%100/10]|0x80; //显示十位 DU = 1; DU = 0; WE = 0; P0 = T_COM[1]; //第二位数码管 WE = 1; WE = 0; Delay_Ms(3); //------------------------------- DU = 0; P0 = table[Value%10]; //显示个位 DU = 1; DU = 0; WE = 0; P0 = T_COM[2]; //第三位数码管 WE = 1; WE = 0; Delay_Ms(3); } /*单总线初始化时序*/ bit ds_init() { bit i; DS = 1; _nop_(); DS = 0; Delay_us(75); //拉低总线499.45us 挂接在总线上的18B20将会全部被复位 DS = 1; //释放总线 Delay_us(4); //延时37.95us 等待18B20发回存在信号 i = DS; Delay_us(20); //141.95us DS = 1; _nop_(); return (i); } /*写一个字节*/ void write_byte(uchar dat) { uchar i; for(i=0;i<8;i++) { DS = 0; _nop_();//产生些时序 DS = dat & 0x01; Delay_us(10);//76.95us DS = 1; //释放总线准备下一次数据写入 _nop_(); dat >>= 1; } } uchar read_byte() { uchar i, j, dat; for(i=0;i<8;i++) { DS = 0; _nop_();//产生读时序 DS = 1; _nop_();//释放总线 j = DS; Delay_us(10);//76.95us DS = 1; _nop_(); dat = (j<<7)|(dat>>1); } return (dat); } void main() { uint i; uchar L, M; /* ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x4e);//写暂存器指令 write_byte(0x7f); write_byte(0xf7); write_byte(0x1f);//配置工作在9位模式下 ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x48);*/ while(1) { ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x44);//发送温度转换指令 ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0xbe);//读取DS18B20暂存器值 L = read_byte(); M = read_byte(); i = M; i <<= 8; i |= L; i = i * 0.0625 * 10 + 0.5; Display(i); } }
/* DS18B20测温程序数码管显示 可测温显示范围为-55℃ 至 +125℃ */ #include <reg52.h> #include <intrins.h> #define MAIN_Fosc 11059200UL //宏定义主时钟HZ /*==================================== 自定义类型名 ====================================*/ typedef unsigned char INT8U; typedef unsigned char uchar; typedef unsigned int INT16U; typedef unsigned int uint; /*==================================== 硬件接口位声明 ====================================*/ sbit DS = P2^2; //DS18B20单总线 sbit DU = P2^6; //数码管段选 sbit WE = P2^7; //数码管位选 /*显示负号*/ uchar s=0; /*==================================== 共阴极数码管段选码 ====================================*/ uchar code table[]={ //0 1 2 3 4 5 6 7 8 0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, //9 A B C D E F - . 关显示 0x6F, 0x77, 0x7C, 0x39, 0x5E, 0x79, 0x71, 0x40, 0x80, 0x00 }; /*==================================== 数码管位选码 ====================================*/ //第1位 2位 3位 4位 5位 6位 7位 8位 uchar code T_COM[] = {0xfe, 0xfd, 0xfb, 0xf7, 0xef, 0xdf, 0xbf, 0x7f};//数码管位码 /*==================================== 函数:void Delay_Ms(INT16U ms) 参数:ms,毫秒延时形参 描述:12T 51单片机自适应主时钟毫秒级延时函数 ====================================*/ void Delay_Ms(INT16U ms) { INT16U i; do{ i = MAIN_Fosc / 96000; while(--i); //96T per loop }while(--ms); } /*us延时函数,执行一次US--所需6.5us进入一次函数需要11.95us*/ void Delay_us(uchar us) { while(us--); } /*==================================== 函数:void Display(unsigned long Value) 参数:Value,显示值 32位 描述: ====================================*/ void Display(unsigned long Value) { uchar i=0; //第一位数码管 //------------------------------ if(s == 0); //如果为负数则不显示 else { DU = 0; //关闭段选 P0 = s; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } //第二位数码管 //------------------------------ if(Value < 1000000); //如果温度值百位为0则不显示 else { DU = 0; //关闭段选 P0 = table[Value/1000000]; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } //第三位数码管 //------------------------------ if(Value < 100000); else { DU = 0; //关闭段选 P0 = table[Value%1000000/100000]; //数码管显示百位 DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } //第四位数码管 //------------------------------- DU = 0; P0 = table[Value%100000/10000]|0x80;//显示温度小数点,温度值个位显示 DU = 1; DU = 0; WE = 0; P0 = T_COM[i++]; WE = 1; WE = 0; Delay_Ms(1); //第五位数码管 //------------------------------- DU = 0; //关闭段选 P0 = table[Value%10000/1000]; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); //第六位数码管 //------------------------------- if((Value%100/10) == 0 && (Value%1000/100) == 0 ); else { DU = 0; //关闭段选 P0 = table[Value%1000/100]; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } //第七位数码管 //------------------------------- if((Value%10) == 0 && (Value%100/10) == 0); else { DU = 0; //关闭段选 P0 = table[Value%100/10]; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } //第八位数码管 //------------------------------- if((Value%10) == 0 ); else { DU = 0; //关闭段选 P0 = table[Value%10]; DU = 1; //打开段选 DU = 0; //关闭段选 WE = 0; //关闭位选 P0 = T_COM[i++]; WE = 1; //打开位选 WE = 0; //关闭位选 Delay_Ms(1); } } /*单总线初始化时序*/ bit ds_init() { bit i; DS = 1; _nop_(); DS = 0; Delay_us(75); //拉低总线499.45us 挂接在总线上的18B20将会全部被复位 DS = 1; //释放总线 Delay_us(4); //延时37.95us 等待18B20发回存在信号 i = DS; Delay_us(20); //141.95us DS = 1; _nop_(); return (i); } /*写一个字节*/ void write_byte(uchar dat) { uchar i; for(i=0;i<8;i++) { DS = 0; _nop_();//产生些时序 DS = dat & 0x01; Delay_us(10);//76.95us DS = 1; //释放总线准备下一次数据写入 _nop_(); dat >>= 1; } } uchar read_byte() { uchar i, j, dat; for(i=0;i<8;i++) { DS = 0; _nop_();//产生读时序 DS = 1; _nop_();//释放总线 j = DS; Delay_us(10);//76.95us DS = 1; _nop_(); dat = (j<<7)|(dat>>1); } return (dat); } void main() { unsigned long temp; uint i; uchar L, M; ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x4e);//写暂存器指令 write_byte(0x7f);//TH用户字节 write_byte(0xf7);//TL用户字节 write_byte(0x7f);//配置工作在12位模式下 ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x48);//拷贝暂存器到温度传感器的EEPROM中 while(1) { ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x44);//发送温度转换指令 ds_init();//初始化DS18B20 write_byte(0xcc);//发送跳跃ROM指令 write_byte(0xbe);//读取DS18B20暂存器值 L = read_byte(); M = read_byte(); //模拟显示-55度,实际测温需注解掉下面这两句 //M = 0xfe; //L = 0x6f; i = M; i <<= 8; i |= L; if(M >= 0x08) //判断是否为负数 { i = ~i + 1;//负数是以补码的形式存放的需要我们需要取反加1 s = 0x40; //显示负数符号 } else s = 0; //为正数则不显示 temp = i * 0.0625 * 10000; //浮点型数据转换 Display(temp); } }