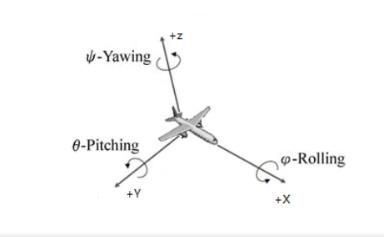
MPU6050: Pitch,Roll,Yaw旋转方向遵循右手定则
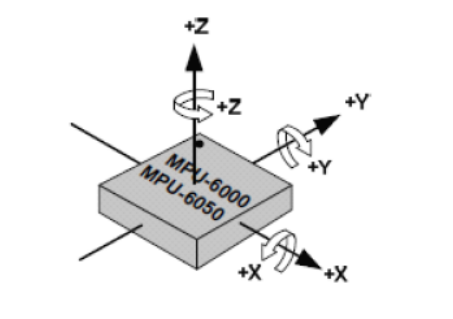
pith角 –绕Y轴(俯仰) 范围:±90° ,与旋转方向相反转是增大 -- 抬头为正,低头为负
roll角 –绕X轴(横滚) 范围:±180° ,与旋转方向相反转是增大 -- 右滚为正,左滚为负
yaw角 –绕z轴(偏航) 范围:±180° ,与旋转方向相反转是增大 --右偏为正,左偏为负
飞机与MPU6050姿态角的关系:
DMP:输出四个数(四元数),经公式转换后得到姿态角pith ,roll,yaw。
(1)使用DMP可以减小主控运算负担,得到的数据不需要滤波 (自己已经进行数据处理)
(2)原始数据—互补滤波—融合算法