针孔相机,带旋转,移动等功能。
类声明:
#pragma once
#ifndef __PINHOLE_HEADER__
#define __PINHOLE_HEADER__
#include "camera.h"
class Pinhole :public Camera {
public:
Pinhole();
~Pinhole();
Pinhole(const Pinhole& ph);
void set_view_distance(const ldouble a);
void set_zoom(const ldouble factor);
void set_angle(const ldouble deg);
Vector3 ray_direction(const Point3& p) const;
virtual Camera* clone() const;
virtual void render_scene(World& w);
Pinhole& operator=(const Pinhole& ph);
private:
ldouble d, zoom;
};
#endif
类实现:
#include "pch.h"
#include "pinhole.h"
#include "../utilities/world.h"
#include "../utilities/viewplane.h"
#include "../samplers/sampler.h"
#include "../tracers/tracer.h"
Pinhole::Pinhole() :Camera(), d(1), zoom(1) {}
Pinhole::Pinhole(const Pinhole& ph) : Camera(ph), d(ph.d), zoom(ph.zoom) {}
Pinhole::~Pinhole() {}
void Pinhole::set_view_distance(const ldouble a) {
d = a;
}
void Pinhole::set_zoom(const ldouble factor) {
zoom = factor;
}
void Pinhole::set_angle(const ldouble deg) {
ldouble rad = radian(deg);
up = Point3(std::cos(rad) * up.x - std::sin(rad) * up.y,
std::sin(rad) * up.x + std::cos(rad) * up.y, up.z);//绕z轴旋转
}
Vector3 Pinhole::ray_direction(const Point3& p) const{
Vector3 dir = p.x * u + p.y * v - w / d;//书中这里是错误的
dir.normalize();
return dir;
}
Camera* Pinhole::clone() const {
return new Pinhole(*this);
}
void Pinhole::render_scene(World& w) {
ViewPlane vp(w.vp);
Ray ray;
integer depth = 0;
Point3 sp, pp;
w.open_window(vp.hres, vp.vres);
vp.s = 1 / (zoom * vp.s);
ray.o = eye;
for (integer r = vp.vres - 1; r >= 0; r--)//render from left-corner to right-corner
for (integer c = 0; c < vp.hres; c++) {
RGBColor color;
for (integer p = 0; p < vp.nsamples; p++) {
sp = vp.sampler->sample_unit_square();
pp.x = (c - 0.5 * vp.hres + sp.x) * vp.s;
pp.y = (r - 0.5 * vp.vres + sp.y) * vp.s;
ray.d = ray_direction(pp);
color += w.tracer_ptr->trace_ray(ray);
}
color /= vp.nsamples;
color *= exposure_time;
w.display_pixel(r, c, color);
}
}
Pinhole& Pinhole::operator=(const Pinhole& ph) {
if (this == &ph)
return *this;
Camera::operator= (ph);
d = ph.d;
zoom = ph.zoom;
return *this;
}
需要修改的World类:
class World {
public:
World();
World(const World& wr);
~World();
void build();
void render();
...
void open_window(const integer hres, const integer vres);
void display_pixel(const integer row, const integer column, const RGBColor& color);
void set_camera(Camera* const cam_ptr);//新加
ViewPlane vp;
Tracer* tracer_ptr;
private:
std::stringstream ss;
std::vector<Geometrics*> objects;
RGBColor backgrd_color;
Camera* camera_ptr;//新加
};
实现代码修改:
void World::build() {
vp.set_hres(200);
vp.set_vres(100);
vp.set_sampler(new Hammersley());
vp.sampler->map_to_sphere();
tracer_ptr = new MultiSphere(this);
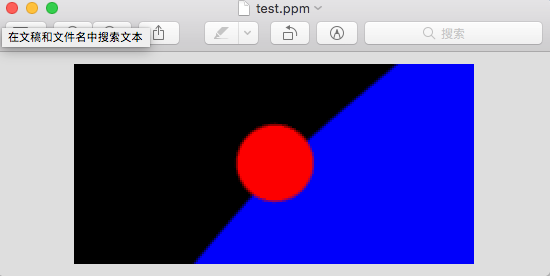
Geometrics* obj = new Sphere(0, 0.5);
obj->set_color(RGBColor(1, 0, 0));
add_object(obj);
obj = new Sphere(Point3(0, -100.5, 0), 100);
obj->set_color(RGBColor(0, 0, 1));
add_object(obj);
Pinhole* pinhole = new Pinhole();
pinhole->set_eye(Point3(0, 0, 1));
pinhole->set_lookat(Point3(0));
pinhole->set_view_distance(1.5);//视距测试
pinhole->set_angle(-45);//旋转测试
//pinhole->set_zoom(2.0);//缩放测试
pinhole->compute_uvw();
set_camera(pinhole);
}
void World::render() {
camera_ptr->render_scene(*this);
}
测试效果图(左旋转45度图):