1,概述
S7-1200 系列 PLC 可以通过 PROFINET 与 V90 PN 伺服驱动器搭配进行速度控制,
PLC 进行启停和速度给定,速度控制计算在 V90 驱动器中,实现的方法主要有以下
两种:
· 方法一、PLC 通过 FB285(SINA_SPEED)功能块,V90 使用 1 号标准报文,
进行速度控制。
· 方法二、不使用任何专用程序块,利用报文的控制字和状态字通过编程进行控
制,V90 使用 1 号标准报文,使用这种方式需要对报文结构比较熟悉。
本文对这两种控制方法分别进行详细介绍。
2,V90 PN 配置要点
使用调试软件 V-Assistant 对 V90 PN 进行配置的要点如表 2-1 所示。
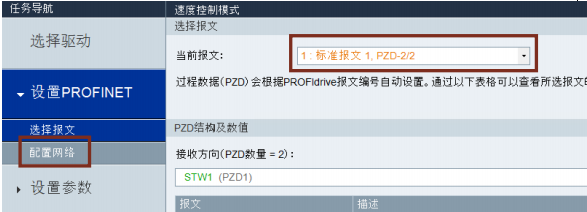
(1)设置控制模式为“速度控制(S)”:

(2)配置通信报文为标准报文 1:
(3)在线连接 V90 后,点击“设置 PROFINET->配置网络”,设置 V90 的 IP 地址及设
备名称:注意:设置的设备名称一定要与 S7-1200 项目中配置的相同。
注意:参数保存后需重启驱动器才能生效。

3,方法一 使用标准报文 1 和 SINA_SPEED;
(1)创建新项目,添加新设备 S7-1200 PLC:

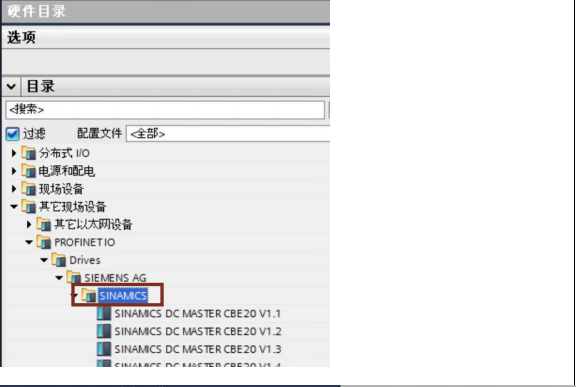
(2)在网络视图中添加 V90 PN 设备并创建与 PLC 的网络连接。
V90 PN 的 GSD 文件在硬件目录中的路径如下:

V90 PN 的 GSD 文件,下载链接:
https://support.industry.siemens.com/cs/ww/en/view/109737269
需注意,此处的 V90 固件版本必须与实际使用的相一致。
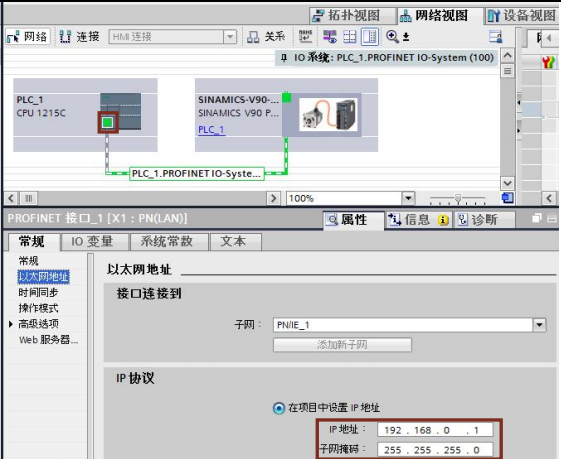
(3)建立 V90 PN 与 PLC 的网络连接,并分别设置 S7-1200 及 V90 PN 的 IP 地址及设
备名称;

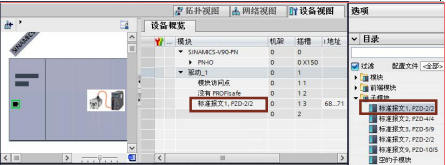
(4)在 V90 PN 的设备视图中设置控制报文为标准报文 1,双击硬件目录子模块中的标
准报文 1:
(5)此种方法需要调用驱动功能库文件,可以通过以下两种方法进行安装:
1. 安装 Startdrive 软件,在 TIA 博途软件中就会自动安装驱动库文件,Startdrive
下载链接:
Startdrive 软件 V14.1:
https://support.industry.siemens.com/cs/us/en/view/68034568
SINAMICS Startdrive V15:
https://support.industry.siemens.com/cs/us/en/view/109754382
SINAMICS Startdrive V15.1:
https://support.industry.siemens.com/cs/us/en/view/109760845
2. 在 TIA 博途中安装 SINAMICS Blocks DriveLib,下载链接:
https://support.industry.siemens.com/cs/ww/en/view/109475044
在 OB1 中将 DriveLib_S7_1200_1500 中的 SINA_Speed(FB285)功能块拖拽到编
程网络中(此功能块只能与报文 1 配合使用),进行速度控制:
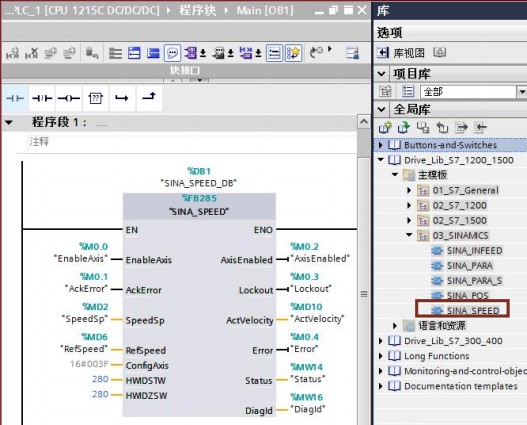
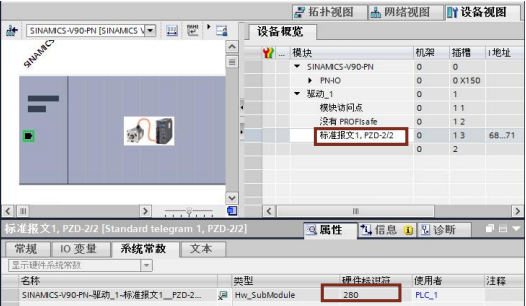
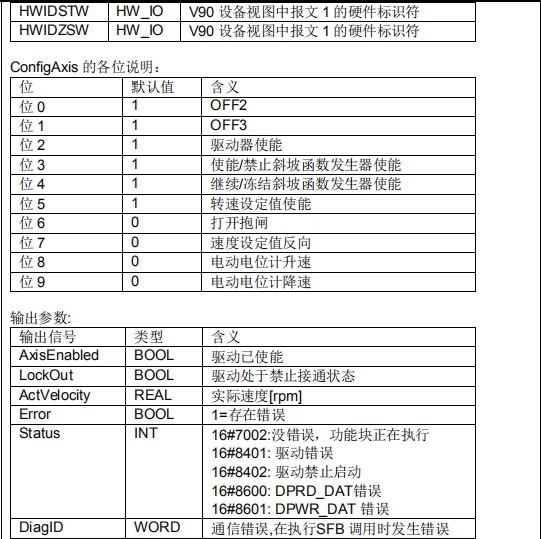
注意:功能块管脚 HWIDSTW 及 HWIDZSW 的赋值请参看下图:
(6)SINA_SPEED 功能块说明:

4, 方法二 PLC 通过 IO 地址直接控制 V90 PN
此种控制方式无需专用的程序块,直接给定速度。V90 使用标准报文 1,项目及网络
配置步骤与第 3 章节中的方法相同。基于 PROFINET RT 通信,通过对输出的第一
个控制字进行驱动器的起停控制、第二个控制字可以给定电机运行的速度。
(1)V90 的输出地址可从设备视图中查看;

在 OB1 中调用 MOVE 命令,发送对驱动的控制字及速度给定:
1. 通过第一个控制字进行驱动器的起停控制(16#047E->16#047F)

2. 通过第二个控制字可以指定电机运行的速度(十六进制 16#4000,即十进制的
16384 对应 p2000 速度参数值)
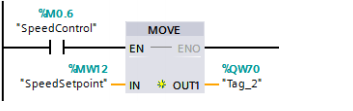
例如,V90 PN 的 p2000=3000rpm,如果 SpeedSetpoint 设置为十进制的 8192
(即十六进制的 16#2000),则表示速度给定为 1500rpm。
可以通过监控表进行运行测试,先给控制字 16#047E 及速度给定:

再给控制字 16#047F 可以启动驱动器,并且进行速度控制。

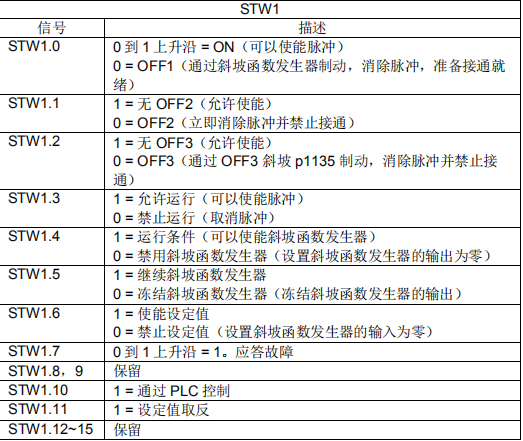
(2)报文 1 的控制字 STW1 控制字的位功能说明如下表所示:
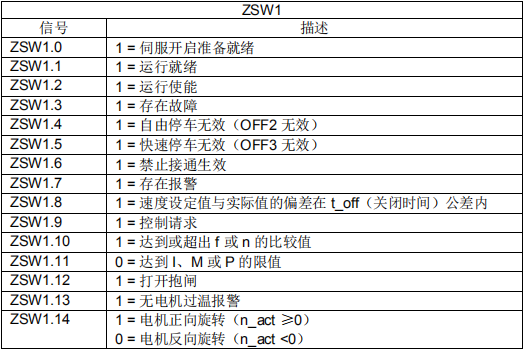
报文 1 的控制字 ZSW1 状态字的位功能说明如下表所示: