动态规划=分治(不是等分,是多阶段)+避免重复计算
是一个多阶段决策问题
核心是状态和状态转移方程
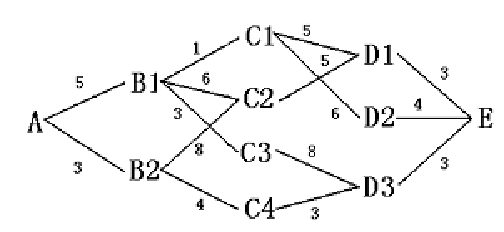
数字三角问题(单向无环最长/最短路径问题):
现有一张地图,各结点代表城市,两结点间连线代表道路,线上数字表示城市间的距离。如图所示,试找出从结点A到结点E的最短距离
递推公式(状态转移方程):

递归
如果用递归的方法,独立性太强而这种dp问题各个阶段之间具有联系,如果用递归就会有大量的重复计算(不仅仅是某个节点的重复而是这个节点的子树的重复计算)
为了避免重复计算,我们应该把已经得到的结果保留下来。将计算变为查询,用空间换取时间。
下面给出两种实现思路:
递推:使用递推公式,由底向顶填表
记忆化搜索(保证每个节点只访问一次也是需要记录)
数学模型
动态规划模型的基本要素
1.阶段
阶段(step)是对整个过程的自然划分。通常根据时间顺序或空间特征来划分阶段,以便按阶段的次序解优化问题。阶段变量一般用k=1,2,..,n表示。
2.状态
状态(state)表示每个阶段开始时过程所处的自然状况。它应该能够描述过程的特征并且具有无后向性,即当某阶段的状态给定时,这个阶段以后过程的演变与该阶段以前各阶段的状态无关,即每个状态都是过去历史的一个完整总结。通常还要求状态是直接或间接可以观测的。
描述状态的变量称状态变量(state variable)。变量允许取值的范围称允许状态集合(set of admissible states)。用xk表示第k阶段的状态变量,它可以是一个数或一个向量。用Xk表示第k阶段的允许状态集合。在引言的例子中x2可取B1,B2,X2={B1,B2}。
n个阶段的决策过程有n+1个状态变量,xn+1表示xn演变的结果
3.决策
当一个阶段的状态确定后,可以作出各种选择从而演变到下一阶段的某个状态,这种选择手段称为决策(decision) 。
描述决策的变量称决策变量(decision variable)。变量允许取值的范围称允许决策集合(set of admissible decisions)。用uk(xk)表示第k阶段处于状态xk时的决策变量,它是xk的函数,用Uk(xk)表示了xk的允许决策集合。在引言的例子中u2(B1)可取C1,C2,C3。决策变量简称决策。
4.策略
决策组成的序列称为策略(policy)。由初始状态x1开始的全过程的策略记作p1n(x1),即p1n(x1)={u1(x1),u2(x2),...,un(xn)}。由第k阶段的状态xk开始到终止状态的后部子过程的策略记作pkn(xk),即pkn(xk)={uk(xk),uk+1(xk+1),...,un(xn)}。类似地,由第k到第j阶段的子过程的策略记作pkj(xk)={uk(xk),uk+1(xk+1),...,uj(xj)}。对于每一个阶段k的某一给定的状态xk,可供选择的策略pkj(xk)有一定的范围,称为允许策略集合(set of admissible policies),用P1n(x1),Pkn(xk),Pkj(xk)表示。
5.状态转移方程
在确定性过程中,一旦某阶段的状态和决策为已知,下阶段的状态便完全确定。用状态转移方程(equation of state)表示这种演变规律,写作:

引言中例子的状态转移方程为:xk+1=uk(xk)
6.指标函数和最优值函数
指标函数(objective function)是衡量过程优劣的数量指标,它是关于策略的数量函数,从阶段k到阶段n的指标函数用Vkn(xk,pkn(xk))表示,k=1,2,...,n。
能够用动态规划解决的问题的指标函数应具有可分离性(可以将大问题分解为子问题),即Vkn可表为xk,uk,Vk+1 n的函数,记为:(可以看出来这个结构是递归的)

动态规划算法的基本步骤
1.分析最优解的性质,并刻划其结构特征。 (无后向性)
2.递归地定义最优值。
3.以自底向上的方式或自顶向下的记忆化方法(备忘录法)计算出最优值。
4.根据计算最优值时得到的信息,构造最优解。