Preface
对于一个初三连三角函数都不会的蒟蒻来说计算几何简直就是噩梦。
反正都是要学的也TM没办法,那就慢慢一点点学起吧。
计算几何要有正确的板子,不然那种几百行CODE的题写死你。
本蒟蒻的学习过程参考dalao's blog和lrj的蓝书
Part 1——基本结构命名与精度控制
首先计算几何就是在一个坐标系内搞来搞去的鬼畜东西,因此点是必不可少的
定义点,还是最普通的坐标表示法:
struct Point
{
DB x,y;
Point (DB X=0,DB Y=0) { x=X; y=Y; }
};
然后就是一个比较牛逼的东西了——向量,根据高中数学必修3上讲的,我们也使用坐标的方式表示一个向量。
说的请楚一点,因为我们知道可以用两个不共线的向量表示同一平面内的任意向量,因此我们把每一个向量(vec a)都分解成(xvec i+yvec j)((vec i,vec j)是单位向量)的形式并且((x,y))就是这个向量的坐标。
由于都可以用坐标表示,我们就直接借用点的表示方法了。
typedef Point Vector;
然而计算几何中有一个不可避免的问题:精度,所以适当的控制精度还是很需要的。
因此我们手动搞一个(EPS),由我们熟知的:
- (|a|<EPS ightarrow a=0)
- (a<-EPS ightarrow a<0)
- (age EPS ightarrow a>0)
我们就可以写一个代码来判断一个数的零的关系(返回(-1,0,1))
inline int dcmp(DB x)
{
if (fabs(x)<EPS) return 0;
return x<-EPS?-1:1;
}
Part 2——点和向量之间的基本运算
一般运算符:
inline Vector operator + (Vector A,Vector B) { return Vector(A.x+B.x,A.y+B.y); }
inline Vector operator - (Point A,Point B) { return Vector(A.x-B.x,A.y-B.y); }
//inline Vector operator - (Vector A,Vector B) { return Vector(A.x-B.x,A.y-B.y); }
inline Vector operator * (Vector A,DB mul) { return Vector(A.x*mul,A.y*mul); }
inline Vector operator / (Vector A,DB div) { return Vector(A.x/div,A.y/div); }
注意一下:向量+向量=向量,点-点=向量(不过其实怎么定义都是一样的)
以及比较两个向量的运算符(个人习惯写在结构体里,这里的Point其实都是Vector的意思):
inline bool operator < (const Point A) const { return dcmp(x-A.x)?x<A.x:y<A.y; }
inline bool operator == (const Point A) const { return !dcmp(x-A.x)&&!dcmp(y-A.y); }
求一个向量的模长,即向量的长度:
inline DB Len(Vector A)
{
return sqrt(A.x*A.x+A.y*A.y);
}
求极角,这个直接用(atan2(y,x))就可以求出(vec a(x,y))的极角了
inline DB Polar_Angle(Vector A)
{
return atan2(A.y,A.x);
}
点积,根据数学书上说的,(vec a cdotvec b)的几何意义为(vec a)在(vec b)上的投影长度乘以(vec b)的模长
用公式表述为:(vec acdot vec b=|vec a|cdot |vec b|cdot cos heta)(( heta)为(vec a,vec b)之间的夹角)
在坐标表示下就是(vec a(x1,y1)cdot vec b(x2,y2)=x1cdot x2+y1cdot y2)
inline DB Dot(Vector A,Vector B)
{
return A.x*B.x+A.y*B.y;
}
点积的应用有很多,以下列举一些常用的:
-
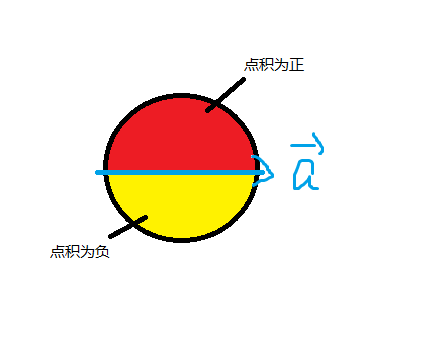
判断两个向量的前后(上下)关系
例如对于以下的向量(vec a),如果另一个向量在红色区域时点积为正,在黄色区域时点积为负
-
判断两个向量是否垂直:(vec a perp vec b Leftrightarrow vec a cdot vec b=0)
-
求两个向量的夹角,这个把点积的定义公式变形一下就好了:
inline DB Angle(Vector A,Vector B) { return acos(Dot(A,B)/Len(A)/Len(B)); } -
求模长,这里可以用另一种方法求模长,即(|vec a|=sqrt{(vec a)^2}):
inline DB Len(Vector A) { return sqrt(Dot(A,A)); }
向量的旋转,这个就是一个公式套上去
(vec a(x,y))可以看成是(xcdot(1,0)+ycdot(0,1))(((1,0))即为(vec i),((0,1))即为(vec j))
分别旋转两个单位向量,则变成(xcdot(cos heta,sin heta)+ycdot(-sin heta,cos heta))
inline Vector Rotate(Vector A,DB rad)
{
DB Cos=cos(rad),Sin=sin(rad);
return Vector(A.x*Cos-A.y*Sin,A.x*Sin+A.y*Cos);
}
法向量,与单位向量垂直的向量称为单位法向量,注意使用之前要判断这个向量是否为零
inline Vector Normal(Vector A)
{
DB l=Len(A); return Vector(-A.y/l,A.x/l);
}
叉积,又是根据数学书上说的,两个向量的叉积是一个标量,(vec a imes vec b)的几何意义为他们所形成的平行四边形的有向面积
注意面积是有向的,一个公式(vec a(x1,y1) imes vec b(x2,y2)=x1cdot y2-x2cdot y1)
inline DB Cross(Vector A,Vector B)
{
return A.x*B.y-A.y*B.x;
}
叉积的应用有很多,以下列举一些常用的:
-
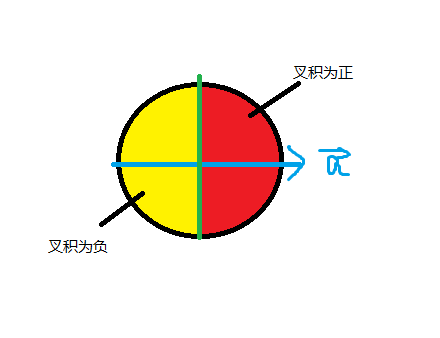
判断两个向量的左右关系
例如对于以下的向量(vec a),如果另一个向量在红色区域时叉积为正,在黄色区域时叉积为负
-
求三角形甚至是多边形的面积
-
求点到线段或者直线的距离
-
判断两个线段或者直线是否相交,并可以求交点
-
其它的很多东西,可以说叉积是整个计算几何的核心内容,这些我们下次再讲
Postscript
计算几何虽然以代码复杂,巨卡精度而闻名,但是学还是要学的不知道联赛考不考
争取近一个月都抽出点时间记录一下吧,接下来上Part1~2的所有模板CODE
#include<cstdio>
#include<cmath>
typedef double DB;
const DB EPS=1e-8;
inline int dcmp(DB x)
{
if (fabs(x)<EPS) return 0;
return x<-EPS?-1:1;
}
struct Point
{
DB x,y;
Point (DB X=0,DB Y=0) { x=X; y=Y; }
inline bool operator < (const Point A) const { return dcmp(x-A.x)?x<A.x:y<A.y; }
inline bool operator == (const Point A) const { return !dcmp(x-A.x)&&!dcmp(y-A.y); }
};
typedef Point Vector;
inline Vector operator + (Vector A,Vector B) { return Vector(A.x+B.x,A.y+B.y); }
inline Vector operator - (Point A,Point B) { return Vector(A.x-B.x,A.y-B.y); }
//inline Vector operator - (Vector A,Vector B) { return Vector(A.x-B.x,A.y-B.y); }
inline Vector operator * (Vector A,DB mul) { return Vector(A.x*mul,A.y*mul); }
inline Vector operator / (Vector A,DB div) { return Vector(A.x/div,A.y/div); }
inline DB Dot(Vector A,Vector B)
{
return A.x*B.x+A.y*B.y;
}
/*inline DB Len(Vector A)
{
return sqrt(A.x*A.x+A.y*A.y);
}*/
inline DB Len(Vector A)
{
return sqrt(Dot(A,A));
}
inline DB Cross(Vector A,Vector B)
{
return A.x*B.y-A.y*B.x;
}
inline DB Polar_Angle(Vector A)
{
return atan2(A.y,A.x);
}
inline DB Angle(Vector A,Vector B)
{
return acos(Dot(A,B)/Len(A)/Len(B));
}
inline Vector Rotate(Vector A,DB rad)
{
DB Cos=cos(rad),Sin=sin(rad);
return Vector(A.x*Cos-A.y*Sin,A.x*Sin+A.y*Cos);
}
inline Vector Normal(Vector A)
{
DB l=Len(A); return Vector(-A.y/l,A.x/l);
}