故障诊断主要包括三部分:
1、故障信号检测方法(定子电流信号检测 [ 定子电流幅值和电流频谱 ] ,振动信号检测,温度信号检测,磁通检测法,绝缘检测法,噪声检测法)
2、故障信号的处理方法,即故障特征提取(FFT,Hilbert 变换,小波变换,Hilbert-Huang变换)。
3、故障识别技术
- 基于解析模型法(建立良好的电机模型并对隔状态参数进行估计,需要较好的专业知识)
- 基于人工智能法(基于专家系统:建立对比数据库;基于神经网络来做故障分类和识别;基于SVM,可处理分类时实现现有样本的最优解)
异步电动机构成:定子,转子,轴承,机座,扇叶和空气间隙
工作原理:通电流引起旋转磁场,旋转磁场和感应电流相互作用,形成电磁转矩,达成了从电能到机械能的转换。
故障类型:
1、定子部分故障(12.9%)
- 定子铁心短路与松动故障:(定、转子相互摩擦),会导致局部过热、空载电流过大、振动和噪声加强。
- 定子绕组短路故障:(负载过载,过压,欠压,绝缘材料有问题),较高热量,短路电流,异常振动。
- 定子绕组接地故障:(绝缘线损坏,线圈直接与铁心或者机座相连)
2、转子部分故障(10%)
- 转子断条(电流增加而且不稳定,发热严重),产生原因:
电机启动时突然增加的电流和温度,受到冲击性负载,转子质量不好都会对转子有很大的冲击。
3、气隙偏心(原本定子和转子应是同心)
这种状况会导致振动和噪声,严重的话会是定子和转子互相摩擦而导致电流过大,情况可分为:
- 静态偏心:制作不规范或者安装不到位
- 动态偏心:机械共振,轴承磨损或者移位
4、轴承故障
- 磨损(振动和噪声加大)
- 疲劳脱落(产生冲击载荷,振动和噪声也会加剧)
- 塑性变形(振动和噪声加剧)
- 腐蚀(电流通过引起电腐蚀,水分或化学液体引起的化学腐蚀)
- 断裂故障(安装不合理和工作中的热应力)
- 胶合(润滑不够或者高速重载):温度会急速升高
- 保持架损坏
电流故障特征频率:
1、定子绕组匝间短路
![]() 其中f1为供电电源频率
其中f1为供电电源频率
2、转子断条故障
![]() 其中f为供电电源频率
其中f为供电电源频率
3、气隙偏心
![]()

4、轴承故障
 故障特征提取的方法:
故障特征提取的方法:
1、基于窗口傅里叶变换
主要分为两步,第一步是在时间上加窗来截取时间段的信号,第二步是对截取后的信号进行傅里叶变换分析。
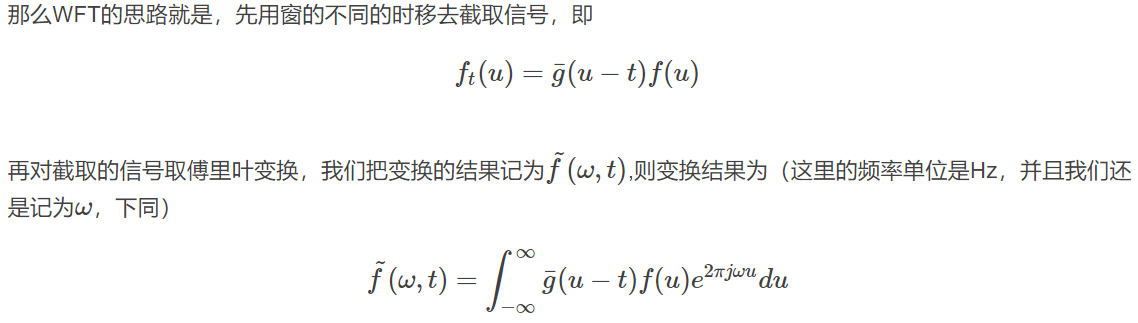
对于时域和频域来说,均有一个中心点,窗函数就是围绕中心点来添加一个矩形框。


参考链接:https://blog.csdn.net/yuejiang_li/article/details/78762201
其缺陷在于:窗函数选定之后局部分辨率也确定了,不能随着信号的变换更改分辨率,自适应性较差;他的时间分辨率和频率分辨率只能二选一,但是有些时候需要时间分辨率较高,有些时候需要频率分辨率较高,窗函数难以达到。
2、小波变换
参考链接:https://blog.csdn.net/cqfdcw/article/details/84995904
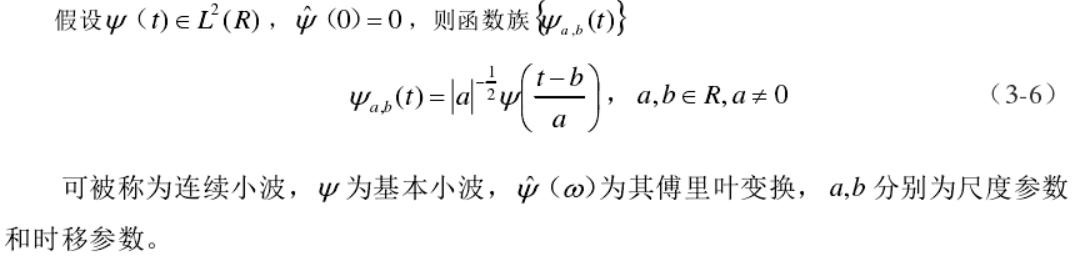
从上述可以看出,a控制位移,b控制伸缩。
当a变大时,时域观察范围变宽,频域观察会变窄,中心向低频移动;当a变小时,时域观察范围变窄,频域观察会变宽,中心向高频移动。对于陡峭和尖脉冲而言,变化迅速,需要良好的时间分辨率。对于低频段信号而言,变换缓慢,需要较好的频率分辨率。因此,小波变换适合非平稳信号,但是它的局限是只针对低频信号做分解。
由此引入了小波包分解,小波包可对低频和高频同时做分解,每次分解均会有小波系数,这些系数可用来做最后的小波重构。
小波变换的局限性有两个,第一个是小波基的选择对最后结果的影响比较大;第二个是基函数比较固定,选定之后无法根据信号调节。
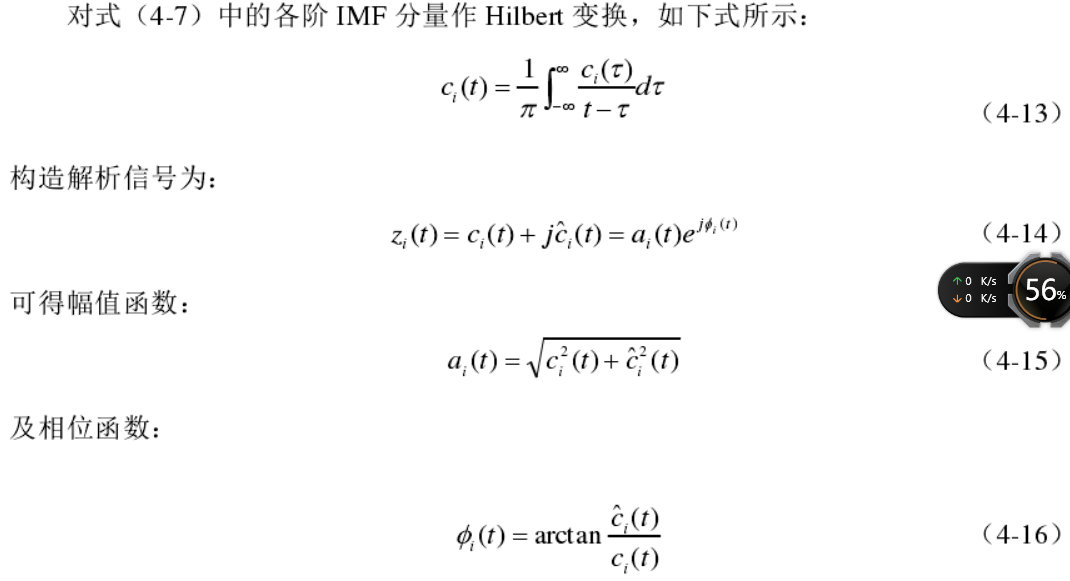
3、Hilbert-Huang变换
基于EMD的HHT
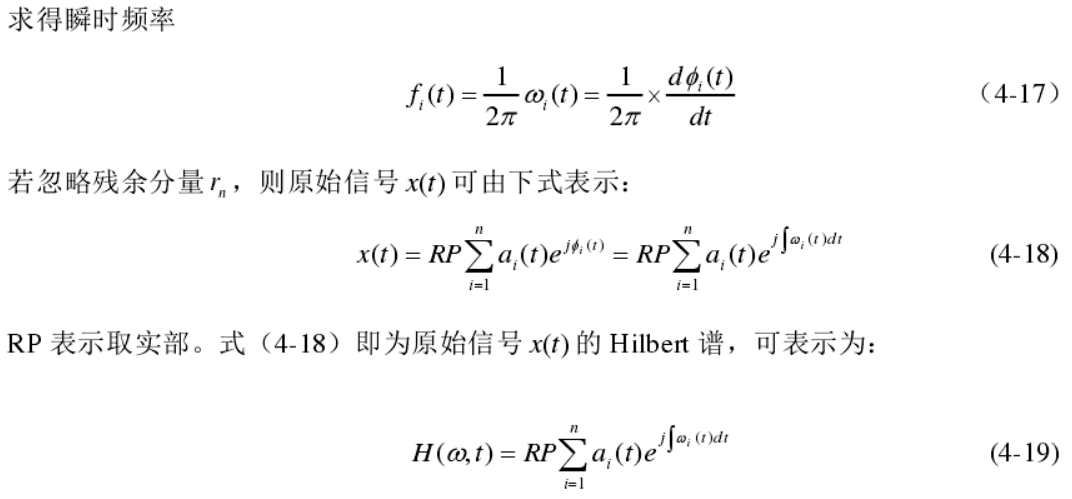
上式可看出变换后幅值与瞬时频率均与时间有关,因此可得到频段中幅值的时频信息。

T为信号总长,边际谱反应的是每个频率的累积幅值分布,可看出有哪些频率出现,通过Hilbert变换可知道频率对应的时间点。
以HHT为基础的故障特征提取的步骤是:
- 利用EMD方法分别对原始故障信息进行分解,看信息的特点,选取n个分量为对象作为特征提取。计算故障特征的频率,对比IMF分量的边际谱图,查看故障特征在哪些IMF分量中的表现最好,就选取哪些。
- 例如电流选取第二、三、四、五个IMF分量作为特征量。
- 求取这四个特征量的边际谱,将边际谱作为特征向量
- 将特征向量做还原处理后作为神经网络的输入值
神经网络:
神经网络模型的不同主要集中在神经元的特性,网络的拓扑结构和学习规则上。文中主要采用RBF神经网络。
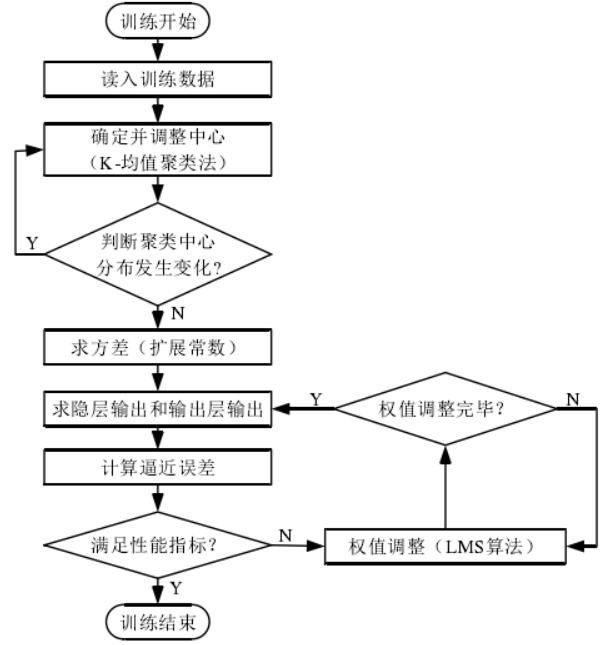
故障诊断网络结构确定的过程为:
- 分别在异步电动机正常、轴承故障、转子断条、转子断条和轴承故障并发状态下采集电流信号
- 对采集完的信号通过HHT做特征处理,提取能够体现故障信息的特征量
- 将处理好的数据作为神经网络的输入,进行训练,当误差满足要求时,神经网络结构被确定。
- 在实际过程中采集定子电流信号,经过处理后作为特征向量输入神经网络进行实时判别,神经网络输出相应状态。
用图表示为:
