在了解P与NP问题之前,先看两个定义,一个是多项式时间复杂度,一个是指数型时间复杂度。
多项式时间复杂度的通项式子可以写成,a*n^k+b*n^(k-1)+……+z*n^0,n代表问题规模。
指数型时间复杂度的通项式子可以写成,k^n,n代表问题规模,k为大于1的常数,或者也可以写成 n! 这类型的式子。
P问题:
P问题指的是能用多项式时间计算出结果的问题,也称之为多项式问题。P是Polynomial,多项式的意思。
NP问题:
NP问题指的是能用多项式时间验证结果正确与否的问题,而不管计算出结果是用多项式时间还是指数型时间。
所有的P问题都是NP问题,因为既然能用多项式时间求得正确结果,那么验证结果正确与否肯定也是多项式时间,最不成就是重新计算一遍正确结果,肯定也是多项式时间。
但是是否所有的NP问题,也就是能用多项式时间验证的问题,都有一个计算正确结果的多项式时间复杂度的算法呢?这个还不知道,所以P=NP? 这个问题也悬而未决。
举个例子,TSP问题,100个城市,任意两个城市之间可以往返,从第一个城市出发,走遍所有城市,最后要回到第一个城市,城市与城市之间的通行费用不等。现在限制总的通行费用是cost,要求找到一条路径能够满足限制条件,而又能游遍所有城市并回到第一个城市。
如果我们要找到这样一条路径,需要遍历所有的可能情况,判断生成的每一条路径是否满足限制条件,一共有99!条这样的路径(假设第一个城市已经确定了下来,必须是从北京出发)。
但是如果我们要验证某一条游遍100个城市并回到第一个城市的路径,是否满足限制条件,只需要计算一下总的费用,便可以判断。
所以,TSP问题是NP问题,但目前还没有找到P的算法,也就是能用多项式时间复杂度计算出结果的算法。
感谢博客https://blog.csdn.net/bitcarmanlee/article/details/51935400的分享。
以下为笔者最近碰到的另一个NP问题,不感兴趣的可以不看啦~(闲聊性质)
笔者为什么最近会关注这个问题呢?因为在看sgbm的算法,博客https://www.cnblogs.com/hrlnw/p/4746170.html提到了sgbm的全局能量函数,说这个能量函数式子是个NP问题。
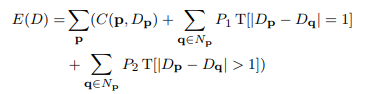
上述式子来源 Hirschmuller, H. Stereo Processing by Semiglobal Matching and Mutual Information, PAMI(30), No. 2, February 2008, pp. 328-341.
可能没有接触过双目视觉领域的同学不太懂这个式子是什么意思。
如果已知整张图片中所有像素点的视差,那么根据上述式子,我们自然就能得到能量E(D)是多少。但是想要求解得到全局最小的能量,我们需要遍历所有情况,这又是一个难以在P时间内求解的问题。
因此sgbm算法“近似分解该问题为多个一维问题,即线性问题。而且每个一维问题都可以用动态规划来解决。因为1个像素有8个相邻像素,因此一般分解为8个一维问题”。
感兴趣的同学可以看下上述博客的介绍,这里就不多讲了。