θ* = argmin L(θ)
梯度方向:损失函数等高线的法线方向(切线方向,变化最快的方向)
θt+1 = θt - ηg(θt)
关于梯度下降的Tips:
1. 调整学习率 adaptive learning rates
简单直觉的想法:训练刚开始的时候可以用比较大的学习率;经过一些epochs之后应该要减小学习率;比如说 1/t decay:ηt = η / √(t+1)
更好的做法是每个参数都有不同的学习率 => 一个比较简单的方法是 adagrad
Adagrad:在 1/t decay 的基础上,不同参数的学习率除以过去(包括该当前时刻)该参数所有微分值的均方,这里 w 表示单个的参数
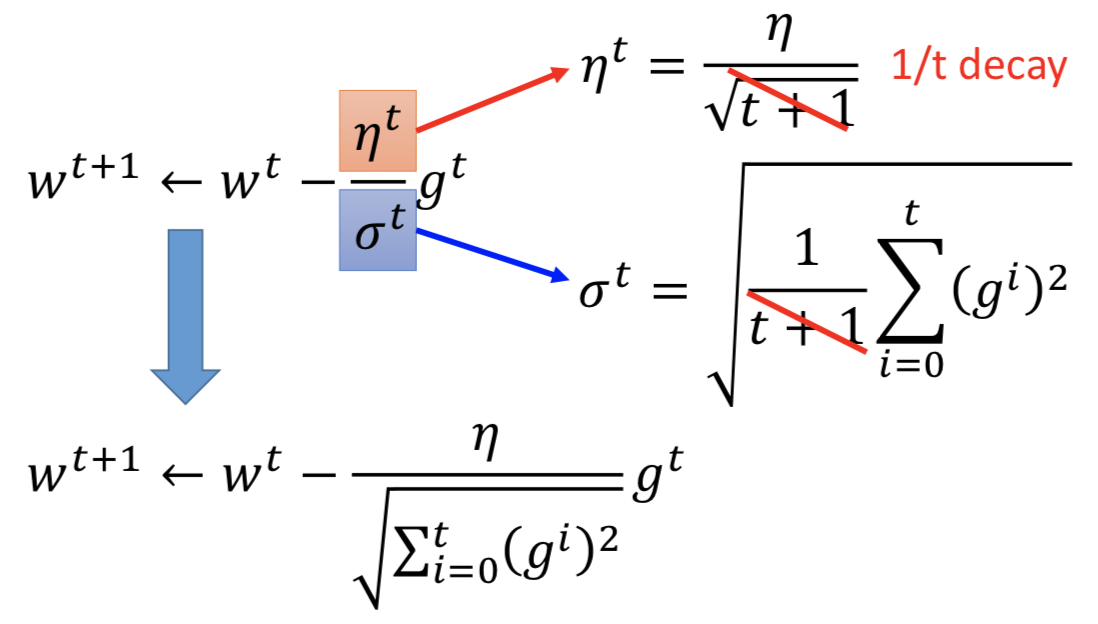 其中,t+1项消掉了
其中,t+1项消掉了但是Adgrad在这里是否存在矛盾呢?
分子的微分项越大,更新的 step 就越大;但同时分母的历史梯度求和项就越大,反而导致 step 越小
直觉的解释:分母的项是为了造成一个反差的效果,如果 t 时刻的梯度和历史梯度的大小突然差别很大,就强调这种变化
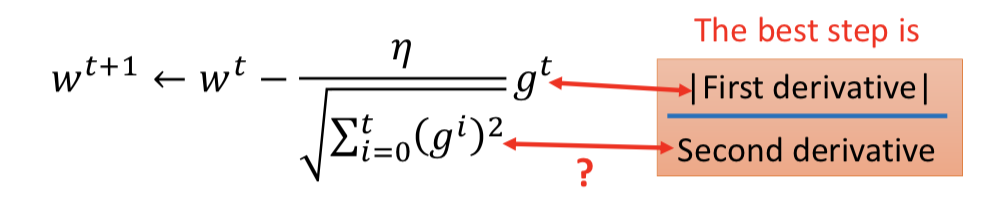
更大的梯度就意味着会走更大的step吗?或者说,一个最合理的step,跟梯度g的关系是什么样的?
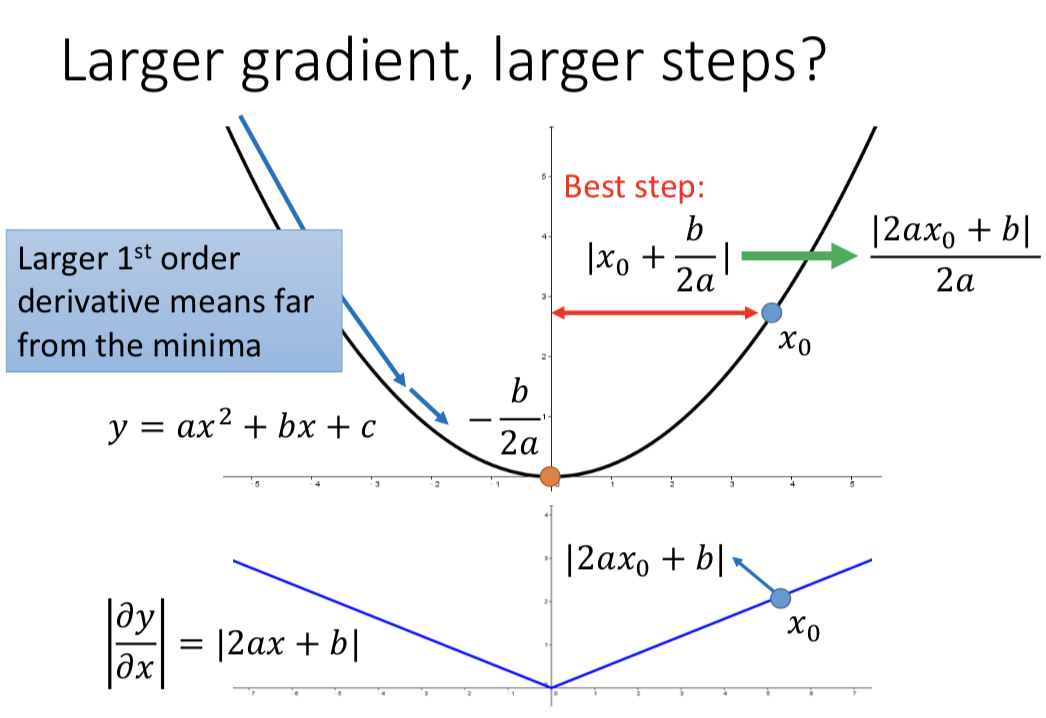
只考虑一个参数:Larger gradient,Larger step,可以;更大的 1st order derivative 意味着离 minima 更远
但同时考虑多个参数时,这个结论有问题:(不能 cross parameters)
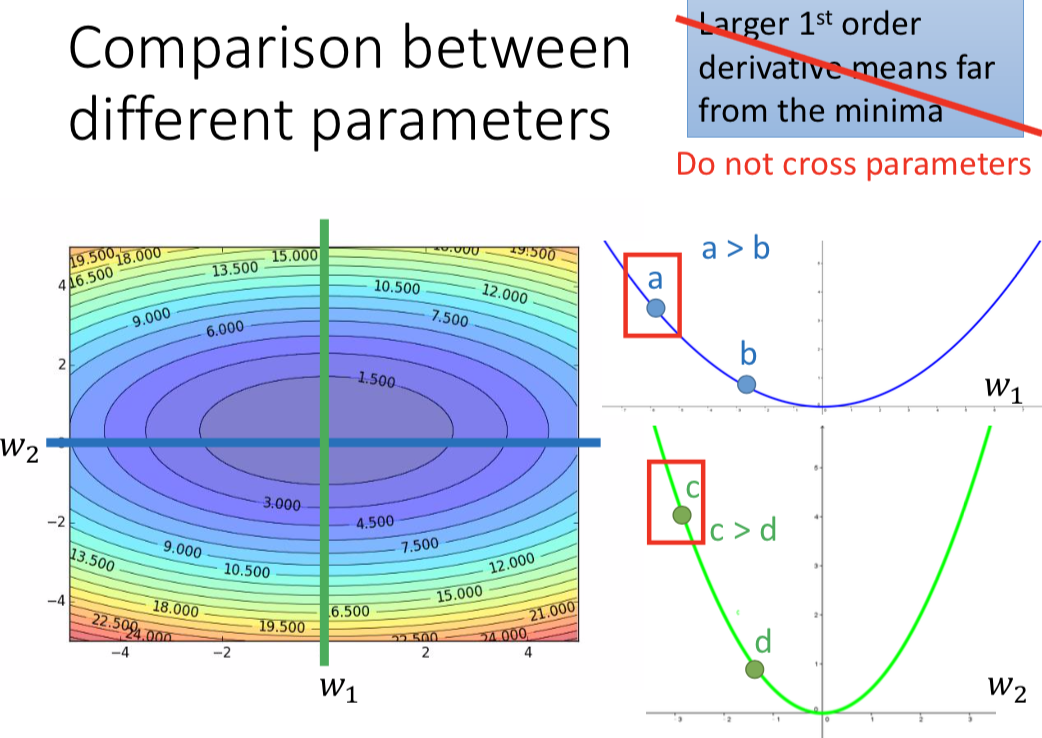
如果要跨参数?—— 再考虑 second order derivative

最好的step:|first derivative| / second derivative,和一次微分成正比,和二次微分成反比,这样才能真正显示到 minima 的距离大小。
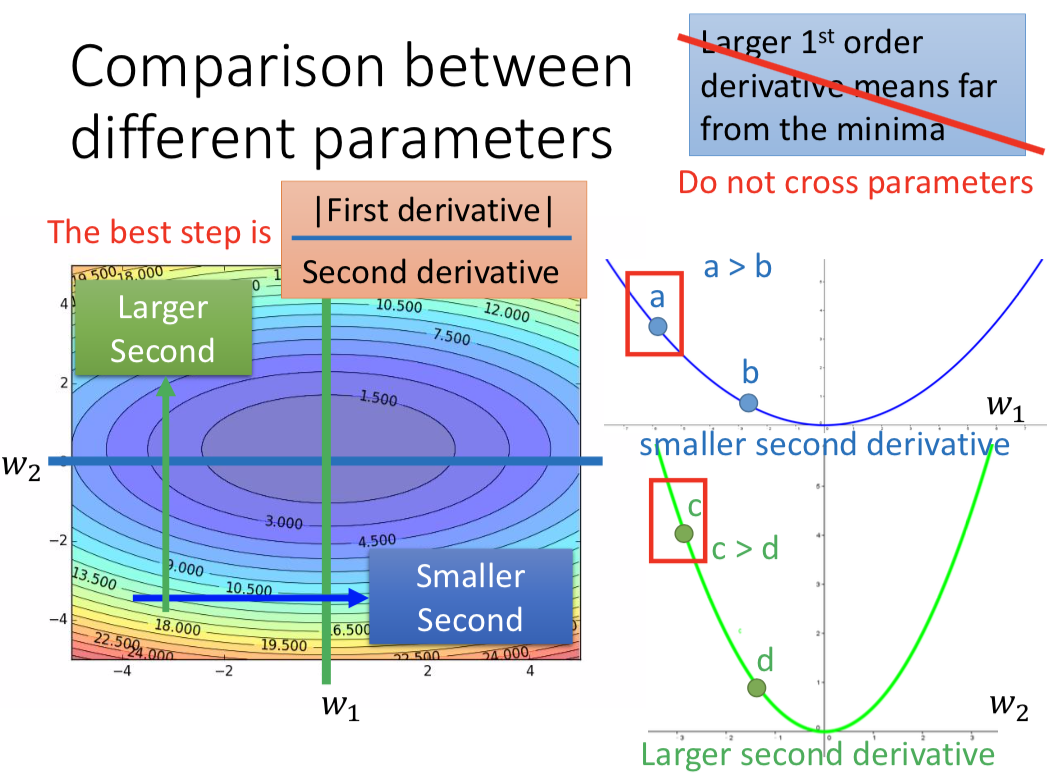
这和 Adagrad 的关系?
用足够多的一次微分的采样点,计算采样的平均值,去估计二次微分的大小趋势。(没有额外运算。当然也可以直接算二次微分,但是计算代价更大)
2. Stochastic Gradient Descent
原始的梯度下降是,全部训练样本都计算完了更新参数一次
stochastic gradient descent,每个样本都更新参数一次,会更快
而实际做的时候,会取一个batch更新一次
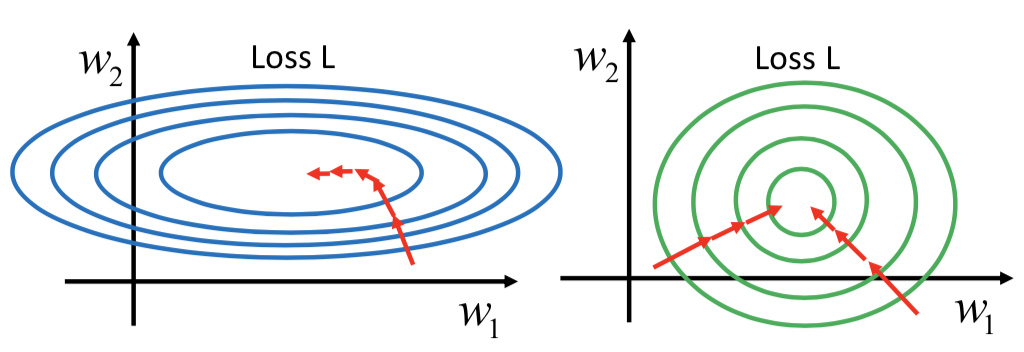
3. Feature Scaling
如果 x2 的数量级大于 x1 ,改变 w2 会对 loss 影响比较大,导致 w2 方向更加 sharp,梯度下降优化过程中不同方向需要的学习率就非常不同。所以 feature scaling 会让优化过程更容易。
常见的做法是 standard scaling
For each dimension i :
mean: mi
standard deviation: σi
xir = (xi - mi) / σi
Gradient Descent 背后的理论 (为什么梯度下降能work)
如果用梯度下降解决一个优化问题,θ* = argmin L(θ),那么每次更新参数都一定会使得损失函数变小吗?(一定能收敛吗?)
——不一定。原因?
假设损失函数有两个参数 {θ1, θ2}
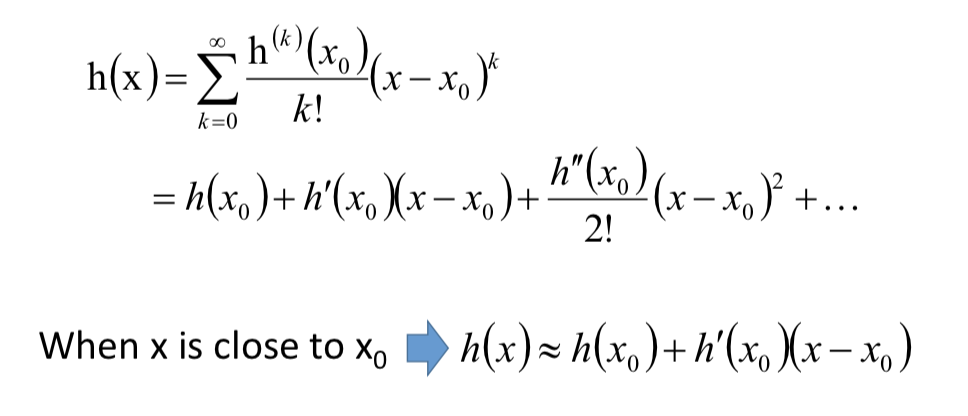
给定一个点p,能够很容易的找出点p邻域内的最小值。 怎么做? => 泰勒公式
只要h(x) 在x0的邻域无限可微,那么h(x)可以表示为
多变量的情况:
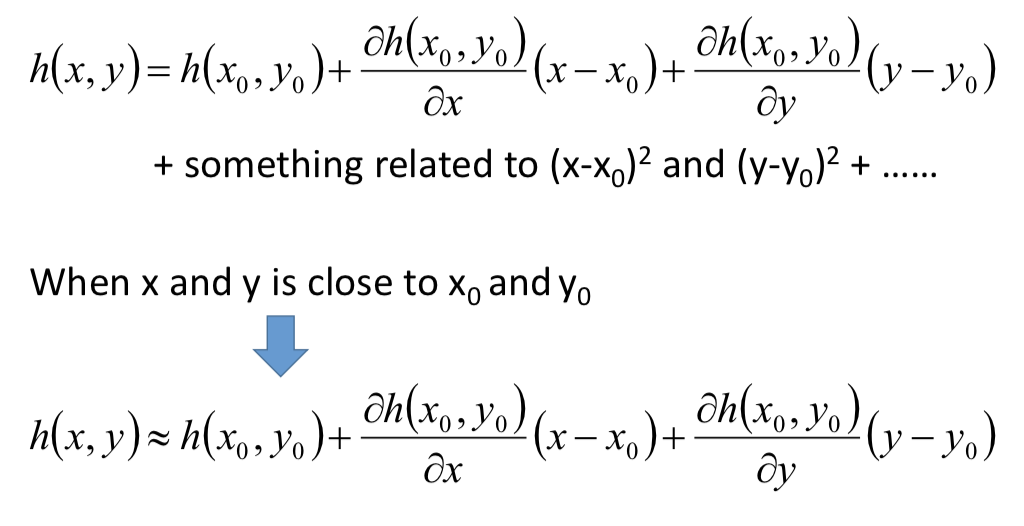
当 (x, y) 很接近 (x0, y0) 的时候,考虑用一阶微分项来近似。即,当处在 (x0, y0) 半径很小的邻域内时,利用泰勒公式来逼近损失函数 L:

其中L(a, b) 和两个微分项都是确定的常数,简化表示法,得到
那么就是要找 {θ1, θ2} 令 L 最小,s.t.
![]()
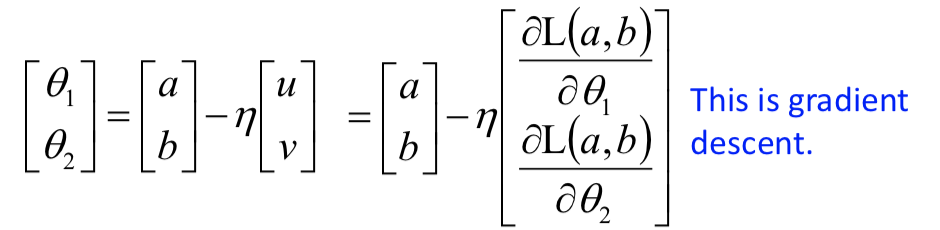
为了最小化 L,就选取和 (u, v) 内积最小的 (θ1 - a, θ2 - b),显然就是 (u, v) 反方向,再正好 scale 到很小的直径d表示的圈边:
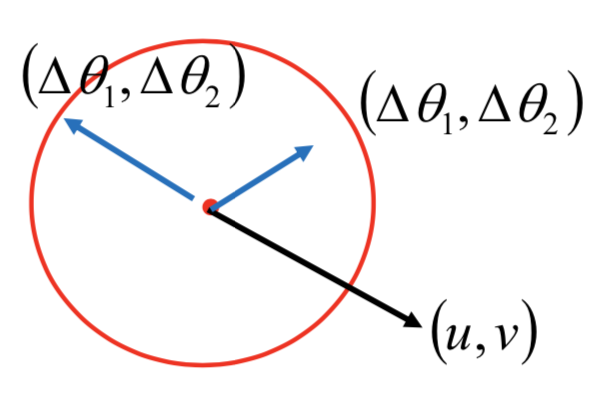
而 u 和 v 表示的正是梯度,这个方法正是梯度下降:
所以,Gradient Descent 能 work 的前提条件是:learning rate 足够小(泰勒公式的逼近够精确)
梯度下降的局限:
1. 卡在局部极小值或者鞍点(微分值为0,但实际上这种情况很少,因为需要所有的方向都满足,参数越多这种情况发生概率越小)
2. 在plateau的阶段很慢(微分值很小,然后就停下了,但其实离 local minima 还很远)