概率路线图(Probabilistic Roadmaps)
简介
概率路线图(PRM)是基于可用空间和占用空间的给定地图内可能路径的网络图。概率路线图法(PRM)将规划分为两个阶段:学习阶段和查询阶段。在学习阶段,建立一个路线图(Q_{free});在查询阶段,利用搜索算法在路线图上寻找路径。
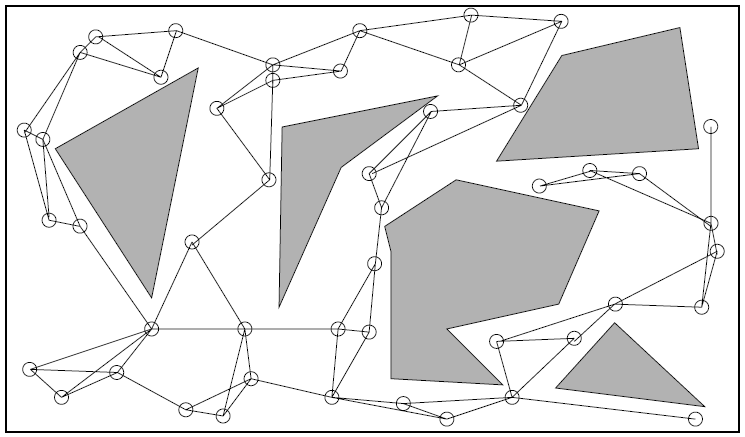
一个质点机器人在二维欧氏空间的路线图示例。
(来源:《Principles of Robot Motion: Theory, Algorithms and Implementations》Fig. 7.3)
PRM这种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。这种方法能用相对少的随机采样点来找到一个解,对多数问题而言,相对少的样本足以覆盖大部分可行的空间,并且找到路径的概率为1(随着采样数增加,P(找到一条路径)指数的趋向于1)。显然,当采样点太少,或者分布不合理时,PRM算法是不完备的,但是随着采用点的增加,也可以达到完备。所以PRM是概率完备且不最优的。
其建立路线图的步骤如下:

(来源:《Principles of Robot Motion: Theory, Algorithms and Implementations》)
一开始,图(G=(V,E))是空的。然后,在配置空间重复采样。这时假定采样是遵守均匀分布。把不碰到障碍的配置加入到路线图中。一共采样(n)次。PRM路径规划器通过使用空闲空间中的随机采样节点并将它们彼此连接,在指定地图的空闲空间中构建路线图。路线图建立后,用户可以在路线图上查询从指定起点到指定终点的路径。
改进算法
- PRM*
参考
- 《Principles of Robot Motion: Theory, Algorithms and Implementations》7.1.
- 《Planning Algorithms》, 5.6 Roadmap Methods for Multiple Queries.
- https://ww2.mathworks.cn/help/robotics/ug/probabilistic-roadmaps-prm.html
- https://www.cnblogs.com/21207-iHome/p/7209954.html
- https://blog.csdn.net/DinnerHowe/article/details/80267062
- Code for Robot Path Planning using Probabilistic Roadmap