正交
如果向量空间中两个向量的內积为0,则他们正交。如果向量空间中的一个向量v与子空间u中的每个向量都正交,那么向量y和子空间u正交。
范数
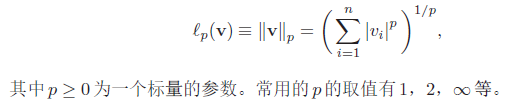
一个表示向量“长度”的函数,为向量空间的所有向量赋予非零的正长度或大小。对于一个n维向量v,一个常见的范数函数为:
ℓ1 范数ℓ1 范数为向量的各个元素的绝对值之和。

ℓ2 范数ℓ2 范数为向量的各个元素的平方和再开平方。
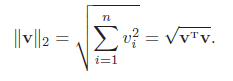
ℓ2 范数又称为Euclidean 范数或者Frobenius 范数。从几何角度,向量也可以表示为从原点出发的一个带箭头的有向线段,其ℓ2 范数为线段的长度,也常称为向量的模。
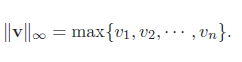
ℓ∞ 范数ℓ∞ 范数为向量的各个元素的最大绝对值
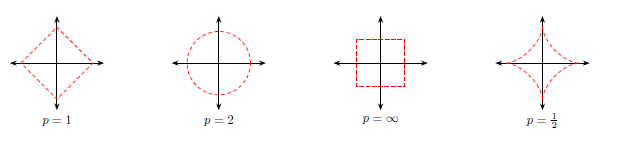
常见的范数示例:
矩阵乘法
矩阵的乘法满足结合律和分配律:
• 结合律:(AB)C = A(BC),
• 分配律:(A + B)C = AC + BC,C(A + B) = CA + CB.
迹
方块矩阵A的对角线元素之和称为它的迹(Trace),记为tr(A)。尽管矩阵的乘法不满足交换律,但它们的迹相同,即tr(AB) = tr(BA)。
行列式
方块矩阵A的行列式是一个将其映射到标量的函数,记作det(A) 或|A|。行列式可以看做是有向面积或体积的概念在欧氏空间中的推广。在n 维欧氏空间中,行列式描述的是一个线性变换对“体积”所造成的影响。
计算方法:取自不同行不同列的n个元素的乘机之和,n为阶数。在n个元素相乘时要乘以sgn(σ),sgn(σ)定义为:
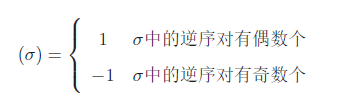
这里的逆序是指元素的下标,如Aij,比较的是i和j的大小。
对称矩阵
对称矩阵(Symmetric Matrix)指其转置等于自己的矩阵,即满足A = AT。
对角矩阵
对角矩阵(Diagonal Matrix)是一个主对角线之外的元素皆为0 的矩阵。对角线上的元素可以为0 或其他值。一个n × n的对角矩阵A满足:
对角矩阵A也可以记为diag(a),a 为一个n维向量,并满足

n × n的对角矩阵A = diag(a) 和n维向量b的乘积为一个n维向量
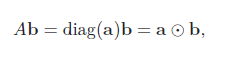
其中⊙表示点乘,即(a ⊙ b)i = aibi。
单位矩阵
单位矩阵(Identity Matrix)是一种特殊的的对角矩阵,其主对角线元素为1,其余元素为0。n 阶单位矩阵In,是一个n × n 的方块矩阵。可以记为In = diag(1, 1, ..., 1)。
一个m × n的矩阵A和单位矩阵的乘积等于其本身。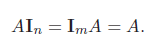
逆矩阵
对于一个n × n的方块矩阵A,如果存在另一个方块矩阵B 使得
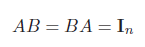
为单位阵,则称A是可逆的。矩阵B 称为矩阵A的逆矩阵(Inverse Matrix),记为A−1。一个方阵的行列式等于0 当且仅当该方阵不可逆。
正定矩阵
对于一个n × n 的对称矩阵A,如果对于所有的非零向量x ∈ Rn都满足
则A为正定矩阵(Positive-Definite Matrix)。如果xTAx ≥ 0,则A是半正定矩阵(Positive-Semidefinite Matrix)。
正交矩阵
正交矩阵(Orthogonal Matrix )A为一个方块矩阵,其逆矩阵等于其转置矩阵。
等价于ATA = AAT = In。
Gram 矩阵
向量空间中一组向量v1, v2 · · · , vn 的Gram 矩阵(Gram Matrix)G是内积的对称矩阵,其元素Gij 为vTi vj。
特征值与特征矢量
如果一个标量λ 和一个非零向量v满足

则λ 和v分别称为矩阵A的特征值(Eigenvalue)和特征向量(Eigenvector)。
奇异值分解
一个m×n的矩阵A的奇异值分解(Singular Value Decomposition,SVD)定义为

其中U 和V 分别为m × m和n × n 的正交矩阵,Σ为m × n 的对角矩阵,其对角线上的元素称为奇异值(Singular Value)。
特征分解
一个n × n的方块矩阵A的特征分解(Eigendecomposition)定义为
其中Q为n×n的方块矩阵,其每一列都为A的特征向量,Λ为对角阵,其每一个对角元素为A的特征值。
如果A为对称矩阵,则A可以被分解为
其中Q为正交阵。