参考视频:【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili
参考文档:http://www.autolabor.com.cn/book/ROSTutorials/
在 ROS 中,提供了一些工具来方便 URDF 文件的编写,比如:
-
check_urdf命令可以检查复杂的 urdf 文件是否存在语法问题 -
urdf_to_graphiz命令可以查看 urdf 模型结构,显示不同 link 的层级关系
当然,要使用工具之前,首先需要安装,安装命令:
sudo apt install liburdfdom-tools
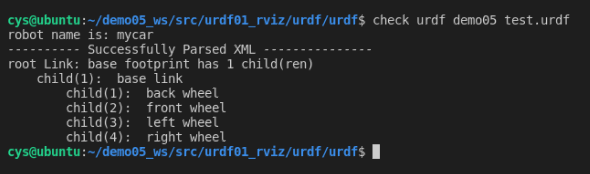
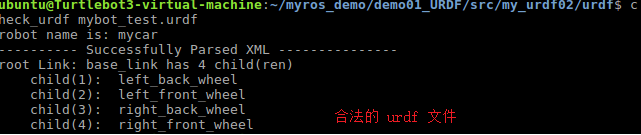
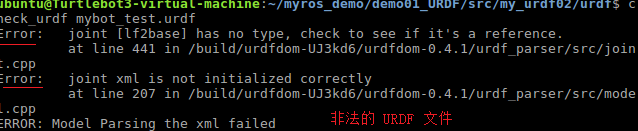
1.check_urdf 语法检查
进入urdf文件所属目录,调用:check_urdf urdf文件,如果不抛出异常,说明文件合法,否则非法

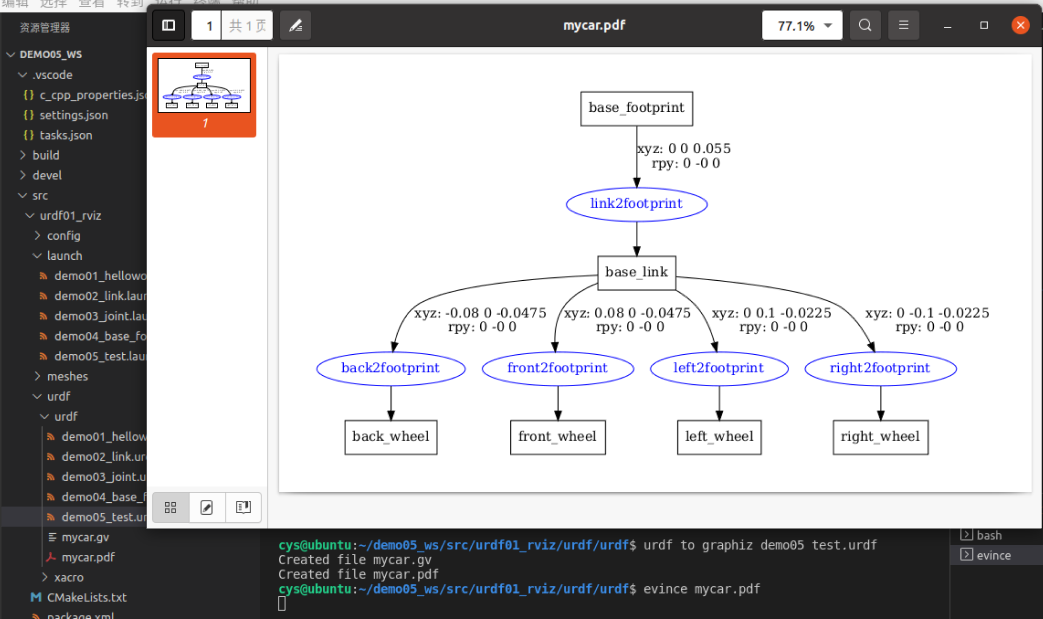
2.urdf_to_graphiz 结构查看
进入urdf文件所属目录,调用:urdf_to_graphiz urdf文件,当前目录下会生成 pdf 文件

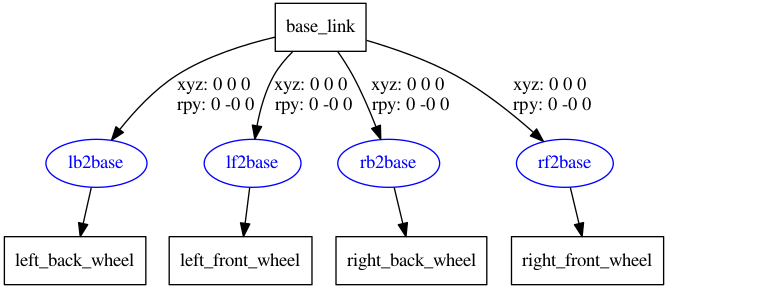
在此终端用 evince mycar.pdf 查看文件