1. 认识机器视觉
1.1. 定义
机器视觉(Machine Vision)是指通过光学装置和非接触传感器自动接收并处理真实物体的图像,分析后获取所需信息或用于控制机器运动的装置。通俗地说,机器视觉就是用机器代替人眼。机器视觉模拟眼睛进行图像采集,经过图像识别和处理提取信息,最终通过执行装置完成操作。

1.2. 视觉系统基本架构
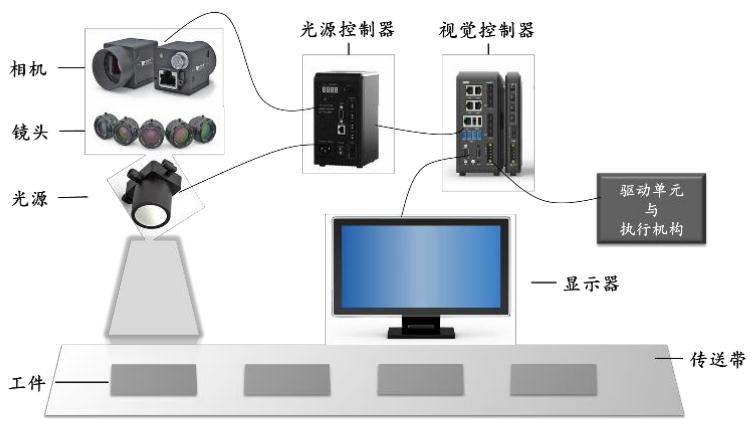
按照信号的流动顺序,机器视觉系统主要包括:
-
光学成像
光学成像模块设计合理的光源和光路,通过镜头将物方空间信息投影到像方,从而获取目标物体的物理信息;
-
图像传感器
图像传感器模块负责信息的光电信号转换,目前主流的图像传感器分为 CCD 与 CMOS 两类;
-
图像处理
图像处理模块基于以 CPU 为中心的电路系统或信息处理芯片,搭配完整的图像处理方案和数据算法库,提取信息的关键参数;
-
IO & 显示
IO 模块输出机器视觉系统的结果和数据;
显示模块方便用户直观监测系统的运行过程,实现图像的可视化。
2. 术语(关键参数)的解释
2.1. 像素
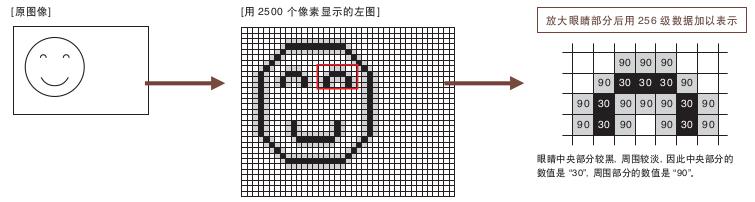
图像是 256 级数据的集合体,像素是图像的基本单元:
不同分辨率的差异

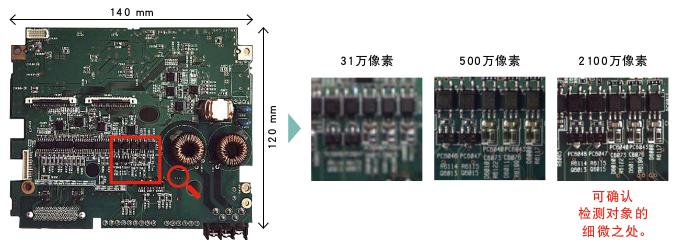
2100万像素相机的实力:
可取得有效像素数 2100 万 (5104×4092 pix)的高分辨率图像。能够检测细微的缺陷、大工件的细微之处。
2.1.1. 常见的标准像素值
由于人眼在左右的长度和上下的宽度方向上的比例约为 4:3 ,所以所成图片的尺寸也是采用这个比例的居多,如:
- 15万像素480X320=153600
- 20万像素640X320=204800
- 30万像素640X480=307200
- 50万像素800X600=480000
- 80万像素1024X768=786432
- 100万像素1140X900=1026000
- 130万像素1280X960=1228800
- 200万像素1600X1200=1920000
- 300万像素2048X1536=3145728
- 500万像素2576X1932=4976832
或2592X1944=5038848
或2560X1920=4915200 - 800万像素3264X2448=7990272
- 1000万像素3648X2736=9980928
- 1200万像素4000X3000=12000000
- 1400万全线4228X3264=13800192
也有采用16:9,如
- 900万像素4000X2256=9024000
更有采用3:2的呢!如
- 600万像素3000X2000=6000000
- 1100万像素4000X2664=10656000
2.1.2. 像素是否越大越好?
-
成本不同
-
应用场景:对于定性检测,并不追求高像素
-
工业相机与民用相机不同
- CCD / CMOS
-
处理时间:芯片对像素的处理时长(检查效率)

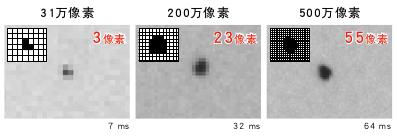
相机的像素数与处理时间的关系
以下是用2432×204031 万像素、200 万像素、500 万像素的相机检测容器上的黑点的例子。如果通过各相机,以相同的视野对比二值化的像素数,可见在检测像素数上有大的差异,像素越高越能实现细微的检测。反之,像素越高,处理时间越长。
2.1.3. 计算最小检测尺寸(检测精度)
一般来说,像素数越大越能检测小东西,但是成本越高。重要的是选择满足“最小检测尺寸”,适合检测内容的相机。
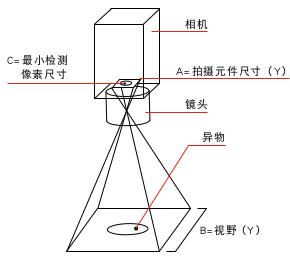
- A=相机的拍摄范围的像素数(Y方向)(像素)
- B=拍摄视野(Y方向)(mm)
- C=拍摄元件的最小检测像素尺寸(像素)
检测精度 = B ÷ A × C
2.2. 工作距离 & 视野范围
考虑工件的尺寸、输送工件时线上位置的偏差,决定用相机拍摄的范围。
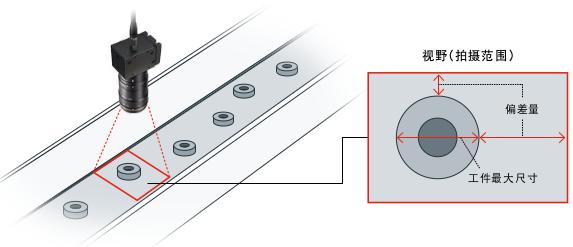
考虑:
- 检测对象工件的最大尺寸是多少?
- 搬运中的位置偏离?
将可拍摄上述决定的想检测的工件的视野,镜头的焦点对准的距离叫做工作距离(WD)。也就是思考可将相机安装在哪一位置。根据设备、环境等预先调查可安装的位置。
WD / FOA = 焦距 / Sensor尺寸
镜头不同,焦距也不同。
2.3. 焦距
焦距是镜头的规格参数之一。
FA 镜头的焦距一般是 8 mm、16 mm、25 mm 或 50 mm。
根据拍摄时所需要的视野及焦距,可以计算出焦点对准的位置(WD,即工作距离)。
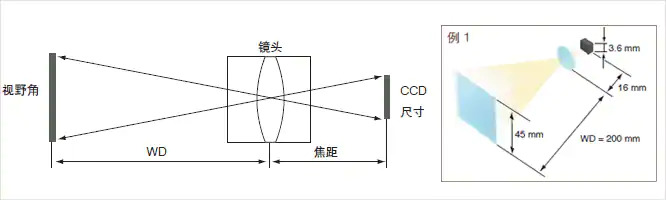
例:镜头焦距 16mm、CCD 尺寸 3.6mm 时,为了得到 45mm 的视野,WD 应为 200mm
2.4. 景深
下图所示为拍摄斜面上表示高度的胶带的情况。

比较小光圈和大光圈时的拍摄效果。


- 镜头焦距越小,景深越大。
- 与拍摄对象距离越远,景深越大。
- 光圈越小,景深越大。
2.5. 镜头畸变(失真)
镜头的失真度是拍摄图像的中央部分与周围部分的变化比率。由于存在像差,拍摄图像的周边部分会发生某种程度的扭曲现象。
失真可分为桶形失真和枕形失真两类。表示失真度的数值(绝对值)越小,则镜头的精度越高。

在测量尺寸时,应使用失真度小的镜头。一般说来,长焦距镜头的失真度会相对小一些。
KEYENCE 的图像处理用镜头为了尽量减少本次介绍的镜头歪曲,在 CA-LH 系列中采用浮动结构来校正歪曲像差,在 CA-LHR 系列中采用浮动结构 + 非球面镜来校正歪曲像差。
2.6. 色像差
-
色像差的原因
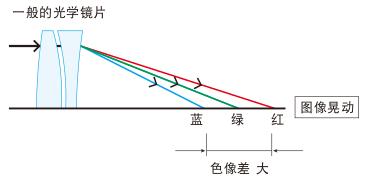
所谓色像差,是指折射率根据可视光波长变化而变化,从而通过镜头的成像发生偏移。折射率不同则意味着焦点距离不同,不同波长的颜色混乱成像,从而感觉成像结果发生晃动。
-
色像差的种类
-
轴上色像差 :
由于折射率根据光的波长变化而变化,各自的焦点也不同,因此整体呈现模糊成像的状态。
-
倍率色像差 :
由于成像的倍率根据颜色变化而变化,因此越靠近镜头边缘越会发生串色。
-
-
色像差的预防方法
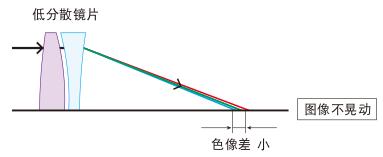
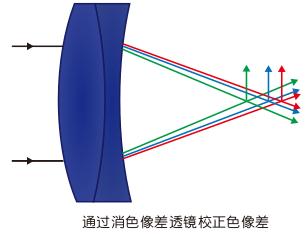
想要解决色像差的问题,可以使用消色像差透镜,即组合使用折射率不同的多个镜头的方法。另外,也可以使用波长分散较少的荧石(氟化钙结晶)或 ED 镜片等作为镜头的材质。
2.7. 快门速度
表示 CCD 或 CMOS 感光元件中蓄积电荷的时间。如果快门速度为 1/250,则蓄积光的时间为 1/250 秒。快门速度越快,则元件的受光量越少,相反如果快门速度越慢,则元件的受光量越多。也可以说,快门速度将起到了调整光量的作用。关于快门速度和受光量(正确来说应该称为蓄积的电荷量),存在以下的关系。
【例】如果将快门速度基准定为 1/1000 秒(1ms),则:
- 快门速度变为 1/500 秒 (2 ms),则受光量变为 2 倍。
- 快门速度变为 1/2000 秒 (0.5 ms),则受光量变为 1/2。
2.8. 何谓增益
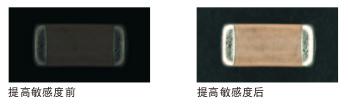
所谓增益,是指将图像信号进行电子增幅的过程。用于图像处理的 CCD 中,配备了可以通过在暗处拍摄时增幅信号,从而看上去变得明亮的功能。另外,还配有根据拍摄对象的亮度自动进行调整的增益控制功能等。
3. 视觉应用的流程
大多数图像传感器制造商在产品目录中,对于第三步“处理” 做了更多的说明。这表明这些厂家更重视控制器的处理能力。实际上,第一步“拍摄”才是得到正确、稳定的图像处理效果所必需的最主要的步骤。而这一步的关键在于“镜头和照明的选择”。
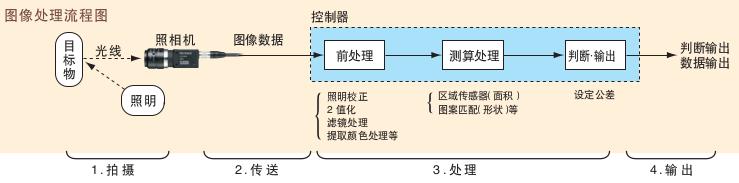
3.1. 图像的捕捉
用相机拍摄工件的图像,并将数据传送到“处理”阶段。
必要设备主要包括“相机”、“镜头”、“照明”。
-
相机
根据工件的种类在不同像素数、传输速度、尺寸等的型号中进行选择。
-
镜头
可从大容量像素型或高分辨率型等外观检测专用镜头中进行选择。
-
照明
有发光部,可支持金属、塑料等各种工件的外观。可根据工件选择 LED、荧光灯或光纤等。
3.2. 图像处理
处理分为“预处理”和“检测处理”2个阶段:
- 预处理: 对图像数据进行加工以方便检测
- 检测处理: 对加工数据进行需要的检测
完成预处理和检测处理后,输出判断结果。
3.3. 输出
根据图像处理控制器的判断结果,控制工作机械和安全装置等各种装置。
-
电脑
可以使用市售电脑(PC)。用于统计检测结果,创建报告。
-
PLC
进行时序控制的必要设备。驱动生产线上的各种装置。
-
扬声器
-
灯泡(警示灯)
-
机械手
-
显示器
可以使用市售电脑显示器,用于实时确认检测情况。