哈希表(Hash Table)这个数据结构,我们已经非常熟悉了。它实现的就是key-value之间的映射关系,主要提供的方法包括Add、Lookup、Delete等。因为这种数据结构是一个基础的数据结构,每个key都会有一个唯一的索引值,通过索引可以很快地找到对应的值,所以使用哈希表进行数据的插入和读取都是很快的。Go语言本身就内建了这样一个数据结构,也就是map数据类型。
今天呢,我们就先来学习Go语言内建的这个map类型,了解它的基本使用方法和使用陷阱,然后再学习如何实现线程安全的map类型,最后我还会给你介绍Go标准库中线程安全的sync.Map类型。学完了这节课,你可以学会几种可以并发访问的map类型。
map的基本使用方法
Go内建的map类型如下:
map[K]V
其中,key类型的K必须是可比较的(comparable),也就是可以通过 == 和 !=操作符进行比较;value的值和类型无所谓,可以是任意的类型,或者为nil。
在Go语言中,bool、整数、浮点数、复数、字符串、指针、Channel、接口都是可比较的,包含可比较元素的struct和数组,这俩也是可比较的,而slice、map、函数值都是不可比较的。
那么,上面这些可比较的数据类型都可以作为map的key吗?显然不是。通常情况下,我们会选择内建的基本类型,比如整数、字符串做key的类型,因为这样最方便。
这里有一点需要注意,如果使用struct类型做key其实是有坑的,因为如果struct的某个字段值修改了,查询map时无法获取它add进去的值,如下面的例子:
type mapKey struct {
key int
}
func main() {
var m = make(map[mapKey]string)
var key = mapKey{10}
m[key] = "hello"
fmt.Printf("m[key]=%s
", m[key])
// 修改key的字段的值后再次查询map,无法获取刚才add进去的值
key.key = 100
fmt.Printf("再次查询m[key]=%s
", m[key])
}
那该怎么办呢?如果要使用struct作为key,我们要保证struct对象在逻辑上是不可变的,这样才会保证map的逻辑没有问题。
以上就是选取key类型的注意点了。接下来,我们看一下使用map[key]函数时需要注意的一个知识点。在Go中,map[key]函数返回结果可以是一个值,也可以是两个值,这是容易让人迷惑的地方。原因在于,如果获取一个不存在的key对应的值时,会返回零值。为了区分真正的零值和key不存在这两种情况,可以根据第二个返回值来区分,如下面的代码的第6行、第7行:
func main() {
var m = make(map[string]int)
m["a"] = 0
fmt.Printf("a=%d; b=%d
", m["a"], m["b"])
av, aexisted := m["a"]
bv, bexisted := m["b"]
fmt.Printf("a=%d, existed: %t; b=%d, existed: %t
", av, aexisted, bv, bexisted)
}
map是无序的,所以当遍历一个map对象的时候,迭代的元素的顺序是不确定的,无法保证两次遍历的顺序是一样的,也不能保证和插入的顺序一致。那怎么办呢?如果我们想要按照key的顺序获取map的值,需要先取出所有的key进行排序,然后按照这个排序的key依次获取对应的值。而如果我们想要保证元素有序,比如按照元素插入的顺序进行遍历,可以使用辅助的数据结构,比如orderedmap,来记录插入顺序。
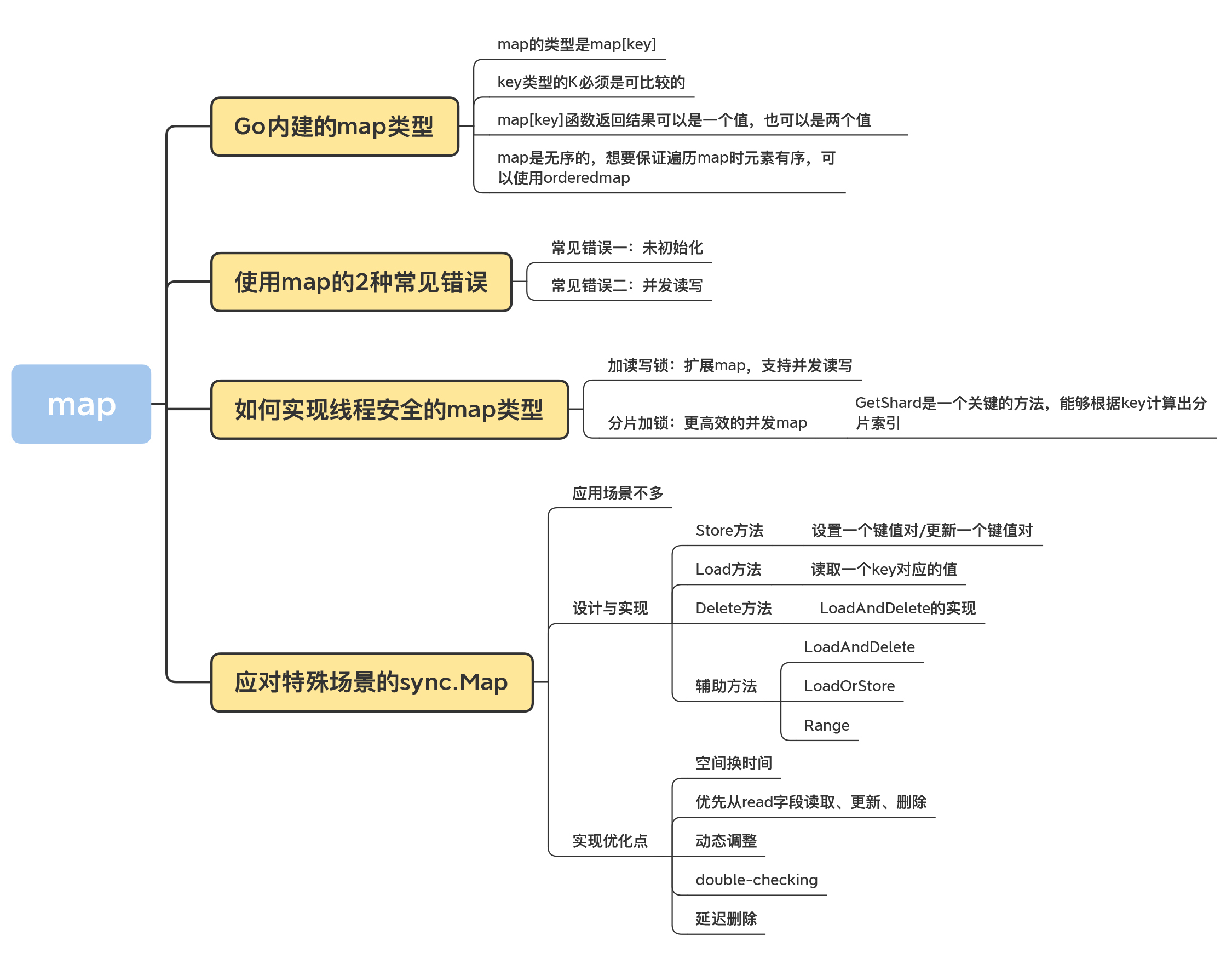
好了,总结下关于map我们需要掌握的内容:map的类型是map[key],key类型的K必须是可比较的,通常情况下,我们会选择内建的基本类型,比如整数、字符串做key的类型。如果要使用struct作为key,我们要保证struct对象在逻辑上是不可变的。在Go中,map[key]函数返回结果可以是一个值,也可以是两个值。map是无序的,如果我们想要保证遍历map时元素有序,可以使用辅助的数据结构,比如orderedmap。
使用map的2种常见错误
那接下来,我们来看使用map最常犯的两个错误,就是未初始化和并发读写。
常见错误一:未初始化
和slice或者Mutex、RWmutex等struct类型不同,map对象必须在使用之前初始化。如果不初始化就直接赋值的话,会出现panic异常,比如下面的例子,m实例还没有初始化就直接进行操作会导致panic(第3行):
func main() {
var m map[int]int
m[100] = 100
}
解决办法就是在第2行初始化这个实例(m := make(map[int]int))。
从一个nil的map对象中获取值不会panic,而是会得到零值,所以下面的代码不会报错:
func main() {
var m map[int]int
fmt.Println(m[100])
}
这个例子很简单,我们可以意识到map的初始化问题。但有时候map作为一个struct字段的时候,就很容易忘记初始化了。
type Counter struct {
Website string
Start time.Time
PageCounters map[string]int
}
func main() {
var c Counter
c.Website = "baidu.com"
c.PageCounters["/"]++
}
所以,关于初始化这一点,我再强调一下,目前还没有工具可以检查,我们只能记住“别忘记初始化”这一条规则。
常见错误二:并发读写
对于map类型,另一个很容易犯的错误就是并发访问问题。这个易错点,相当令人讨厌,如果没有注意到并发问题,程序在运行的时候就有可能出现并发读写导致的panic。
Go内建的map对象不是线程(goroutine)安全的,并发读写的时候运行时会有检查,遇到并发问题就会导致panic。
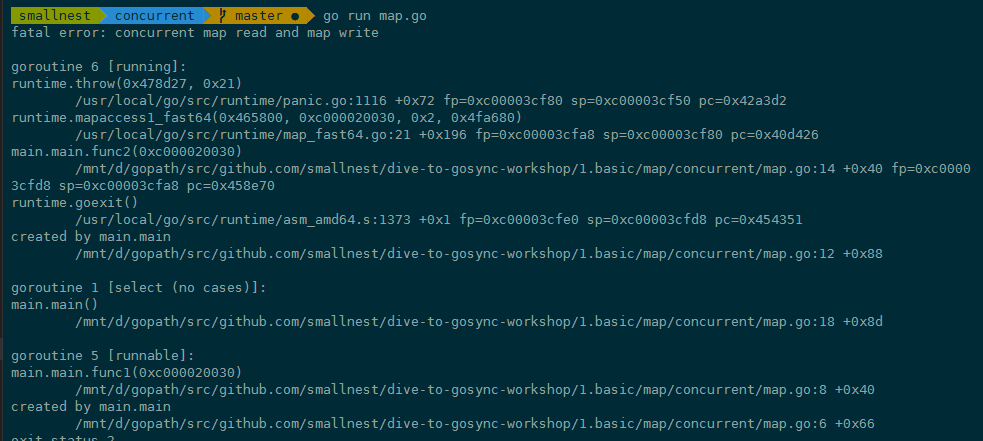
我们一起看一个并发访问map实例导致panic的例子:
func main() {
var m = make(map[int]int,10) // 初始化一个map
go func() {
for {
m[1] = 1 //设置key
}
}()
go func() {
for {
_ = m[2] //访问这个map
}
}()
select {}
}
虽然这段代码看起来是读写goroutine各自操作不同的元素,貌似map也没有扩容的问题,但是运行时检测到同时对map对象有并发访问,就会直接panic。panic信息会告诉我们代码中哪一行有读写问题,根据这个错误信息你就能快速定位出来是哪一个map对象在哪里出的问题了。
这个错误非常常见,是几乎每个人都会踩到的坑。其实,不只是我们写代码时容易犯这个错,一些知名的项目中也是屡次出现这个问题,比如Docker issue 40772,在删除map对象的元素时忘记了加锁:
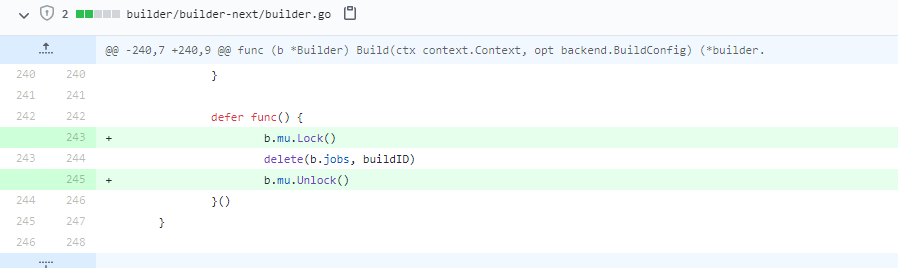
Docker issue 40772,Docker issue 35588、34540、39643等等,也都有并发读写map的问题。
除了Docker中,Kubernetes的issue 84431、72464、68647、64484、48045、45593、37560等,以及TiDB的issue 14960和17494等,也出现了这个错误。
这么多人都会踩的坑,有啥解决方案吗?肯定有,那接下来,我们就继续来看如何解决内建map的并发读写问题。
如何实现线程安全的map类型?
避免map并发读写panic的方式之一就是加锁,考虑到读写性能,可以使用读写锁提供性能。
加读写锁:扩展map,支持并发读写
比较遗憾的是,目前Go还没有正式发布泛型特性,我们还不能实现一个通用的支持泛型的加锁map。但是,将要发布的泛型方案已经可以验证测试了,离发布也不远了,也许发布之后sync.Map就支持泛型了。
当然了,如果没有泛型支持,我们也能解决这个问题。我们可以通过interface{}来模拟泛型,但还是要涉及接口和具体类型的转换,比较复杂,还不如将要发布的泛型方案更直接、性能更好。
这里我以一个具体的map类型为例,来演示利用读写锁实现线程安全的map[int]int类型:
type RWMap struct { // 一个读写锁保护的线程安全的map
sync.RWMutex // 读写锁保护下面的map字段
m map[int]int
}
// 新建一个RWMap
func NewRWMap(n int) *RWMap {
return &RWMap{
m: make(map[int]int, n),
}
}
func (m *RWMap) Get(k int) (int, bool) { //从map中读取一个值
m.RLock()
defer m.RUnlock()
v, existed := m.m[k] // 在锁的保护下从map中读取
return v, existed
}
func (m *RWMap) Set(k int, v int) { // 设置一个键值对
m.Lock() // 锁保护
defer m.Unlock()
m.m[k] = v
}
func (m *RWMap) Delete(k int) { //删除一个键
m.Lock() // 锁保护
defer m.Unlock()
delete(m.m, k)
}
func (m *RWMap) Len() int { // map的长度
m.RLock() // 锁保护
defer m.RUnlock()
return len(m.m)
}
func (m *RWMap) Each(f func(k, v int) bool) { // 遍历map
m.RLock() //遍历期间一直持有读锁
defer m.RUnlock()
for k, v := range m.m {
if !f(k, v) {
return
}
}
}
正如这段代码所示,对map对象的操作,无非就是增删改查和遍历等几种常见操作。我们可以把这些操作分为读和写两类,其中,查询和遍历可以看做读操作,增加、修改和删除可以看做写操作。如例子所示,我们可以通过读写锁对相应的操作进行保护。
分片加锁:更高效的并发map
虽然使用读写锁可以提供线程安全的map,但是在大量并发读写的情况下,锁的竞争会非常激烈。我在第4讲中提到过,锁是性能下降的万恶之源之一。
在并发编程中,我们的一条原则就是尽量减少锁的使用。一些单线程单进程的应用(比如Redis等),基本上不需要使用锁去解决并发线程访问的问题,所以可以取得很高的性能。但是对于Go开发的应用程序来说,并发是常用的一个特性,在这种情况下,我们能做的就是,尽量减少锁的粒度和锁的持有时间。
你可以优化业务处理的代码,以此来减少锁的持有时间,比如将串行的操作变成并行的子任务执行。不过,这就是另外的故事了,今天我们还是主要讲对同步原语的优化,所以这里我重点讲如何减少锁的粒度。
减少锁的粒度常用的方法就是分片(Shard),将一把锁分成几把锁,每个锁控制一个分片。Go比较知名的分片并发map的实现是orcaman/concurrent-map。
它默认采用32个分片,GetShard是一个关键的方法,能够根据key计算出分片索引。
var SHARD_COUNT = 32
// 分成SHARD_COUNT个分片的map
type ConcurrentMap []*ConcurrentMapShared
// 通过RWMutex保护的线程安全的分片,包含一个map
type ConcurrentMapShared struct {
items map[string]interface{}
sync.RWMutex // Read Write mutex, guards access to internal map.
}
// 创建并发map
func New() ConcurrentMap {
m := make(ConcurrentMap, SHARD_COUNT)
for i := 0; i < SHARD_COUNT; i++ {
m[i] = &ConcurrentMapShared{items: make(map[string]interface{})}
}
return m
}
// 根据key计算分片索引
func (m ConcurrentMap) GetShard(key string) *ConcurrentMapShared {
return m[uint(fnv32(key))%uint(SHARD_COUNT)]
}
增加或者查询的时候,首先根据分片索引得到分片对象,然后对分片对象加锁进行操作:
func (m ConcurrentMap) Set(key string, value interface{}) {
// 根据key计算出对应的分片
shard := m.GetShard(key)
shard.Lock() //对这个分片加锁,执行业务操作
shard.items[key] = value
shard.Unlock()
}
func (m ConcurrentMap) Get(key string) (interface{}, bool) {
// 根据key计算出对应的分片
shard := m.GetShard(key)
shard.RLock()
// 从这个分片读取key的值
val, ok := shard.items[key]
shard.RUnlock()
return val, ok
}
当然,除了GetShard方法,ConcurrentMap还提供了很多其他的方法。这些方法都是通过计算相应的分片实现的,目的是保证把锁的粒度限制在分片上。
好了,到这里我们就学会了解决map并发panic的两个方法:加锁和分片。
在我个人使用并发map的过程中,加锁和分片加锁这两种方案都比较常用,如果是追求更高的性能,显然是分片加锁更好,因为它可以降低锁的粒度,进而提高访问此map对象的吞吐。如果并发性能要求不是那么高的场景,简单加锁方式更简单。
接下来,我会继续给你介绍sync.Map,这是Go官方线程安全map的标准实现。虽然是官方标准,反而是不常用的,为什么呢?一句话来说就是map要解决的场景很难描述,很多时候在做抉择时根本就不知道该不该用它。但是呢,确实有一些特定的场景,我们需要用到sync.Map来实现,所以还是很有必要学习这个知识点。具体什么场景呢,我慢慢给你道来。
应对特殊场景的sync.Map
Go内建的map类型不是线程安全的,所以Go 1.9中增加了一个线程安全的map,也就是sync.Map。但是,我们一定要记住,这个sync.Map并不是用来替换内建的map类型的,它只能被应用在一些特殊的场景里。
那这些特殊的场景是啥呢?官方的文档中指出,在以下两个场景中使用sync.Map,会比使用map+RWMutex的方式,性能要好得多:
- 只会增长的缓存系统中,一个key只写入一次而被读很多次;
- 多个goroutine为不相交的键集读、写和重写键值对。
这两个场景说得都比较笼统,而且,这些场景中还包含了一些特殊的情况。所以,官方建议你针对自己的场景做性能评测,如果确实能够显著提高性能,再使用sync.Map。
这么来看,我们能用到sync.Map的场景确实不多。即使是sync.Map的作者Bryan C. Mills,也很少使用sync.Map,即便是在使用sync.Map的时候,也是需要临时查询它的API,才能清楚记住它的功能。所以,我们可以把sync.Map看成一个生产环境中很少使用的同步原语。
sync.Map的实现
那sync.Map是怎么实现的呢?它是如何解决并发问题提升性能的呢?其实sync.Map的实现有几个优化点,这里先列出来,我们后面慢慢分析。
- 空间换时间。通过冗余的两个数据结构(只读的read字段、可写的dirty),来减少加锁对性能的影响。对只读字段(read)的操作不需要加锁。
- 优先从read字段读取、更新、删除,因为对read字段的读取不需要锁。
- 动态调整。miss次数多了之后,将dirty数据提升为read,避免总是从dirty中加锁读取。
- double-checking。加锁之后先还要再检查read字段,确定真的不存在才操作dirty字段。
- 延迟删除。删除一个键值只是打标记,只有在提升dirty字段为read字段的时候才清理删除的数据。
要理解sync.Map这些优化点,我们还是得深入到它的设计和实现上,去学习它的处理方式。
我们先看一下map的数据结构:
type Map struct {
mu Mutex
// 基本上你可以把它看成一个安全的只读的map
// 它包含的元素其实也是通过原子操作更新的,但是已删除的entry就需要加锁操作了
read atomic.Value // readOnly
// 包含需要加锁才能访问的元素
// 包括所有在read字段中但未被expunged(删除)的元素以及新加的元素
dirty map[interface{}]*entry
// 记录从read中读取miss的次数,一旦miss数和dirty长度一样了,就会把dirty提升为read,并把dirty置空
misses int
}
type readOnly struct {
m map[interface{}]*entry
amended bool // 当dirty中包含read没有的数据时为true,比如新增一条数据
}
// expunged是用来标识此项已经删掉的指针
// 当map中的一个项目被删除了,只是把它的值标记为expunged,以后才有机会真正删除此项
var expunged = unsafe.Pointer(new(interface{}))
// entry代表一个值
type entry struct {
p unsafe.Pointer // *interface{}
}
如果dirty字段非nil的话,map的read字段和dirty字段会包含相同的非expunged的项,所以如果通过read字段更改了这个项的值,从dirty字段中也会读取到这个项的新值,因为本来它们指向的就是同一个地址。
dirty包含重复项目的好处就是,一旦miss数达到阈值需要将dirty提升为read的话,只需简单地把dirty设置为read对象即可。不好的一点就是,当创建新的dirty对象的时候,需要逐条遍历read,把非expunged的项复制到dirty对象中。
接下来,我们就深入到源码去看看sync.map的实现。在看这部分源码的过程中,我们只要重点关注Store、Load和Delete这3个核心的方法就可以了。
Store、Load和Delete这三个核心函数的操作都是先从read字段中处理的,因为读取read字段的时候不用加锁。
Store方法
我们先来看Store方法,它是用来设置一个键值对,或者更新一个键值对的。
func (m *Map) Store(key, value interface{}) {
read, _ := m.read.Load().(readOnly)
// 如果read字段包含这个项,说明是更新,cas更新项目的值即可
if e, ok := read.m[key]; ok && e.tryStore(&value) {
return
}
// read中不存在,或者cas更新失败,就需要加锁访问dirty了
m.mu.Lock()
read, _ = m.read.Load().(readOnly)
if e, ok := read.m[key]; ok { // 双检查,看看read是否已经存在了
if e.unexpungeLocked() {
// 此项目先前已经被删除了,通过将它的值设置为nil,标记为unexpunged
m.dirty[key] = e
}
e.storeLocked(&value) // 更新
} else if e, ok := m.dirty[key]; ok { // 如果dirty中有此项
e.storeLocked(&value) // 直接更新
} else { // 否则就是一个新的key
if !read.amended { //如果dirty为nil
// 需要创建dirty对象,并且标记read的amended为true,
// 说明有元素它不包含而dirty包含
m.dirtyLocked()
m.read.Store(readOnly{m: read.m, amended: true})
}
m.dirty[key] = newEntry(value) //将新值增加到dirty对象中
}
m.mu.Unlock()
}
可以看出,Store既可以是新增元素,也可以是更新元素。如果运气好的话,更新的是已存在的未被删除的元素,直接更新即可,不会用到锁。如果运气不好,需要更新(重用)删除的对象、更新还未提升的dirty中的对象,或者新增加元素的时候就会使用到了锁,这个时候,性能就会下降。
所以从这一点来看,sync.Map适合那些只会增长的缓存系统,可以进行更新,但是不要删除,并且不要频繁地增加新元素。
新加的元素需要放入到dirty中,如果dirty为nil,那么需要从read字段中复制出来一个dirty对象:
func (m *Map) dirtyLocked() {
if m.dirty != nil { // 如果dirty字段已经存在,不需要创建了
return
}
read, _ := m.read.Load().(readOnly) // 获取read字段
m.dirty = make(map[interface{}]*entry, len(read.m))
for k, e := range read.m { // 遍历read字段
if !e.tryExpungeLocked() { // 把非punged的键值对复制到dirty中
m.dirty[k] = e
}
}
}
Load方法
Load方法用来读取一个key对应的值。它也是从read开始处理,一开始并不需要锁。
func (m *Map) Load(key interface{}) (value interface{}, ok bool) {
// 首先从read处理
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
if !ok && read.amended { // 如果不存在并且dirty不为nil(有新的元素)
m.mu.Lock()
// 双检查,看看read中现在是否存在此key
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended {//依然不存在,并且dirty不为nil
e, ok = m.dirty[key]// 从dirty中读取
// 不管dirty中存不存在,miss数都加1
m.missLocked()
}
m.mu.Unlock()
}
if !ok {
return nil, false
}
return e.load() //返回读取的对象,e既可能是从read中获得的,也可能是从dirty中获得的
}
如果幸运的话,我们从read中读取到了这个key对应的值,那么就不需要加锁了,性能会非常好。但是,如果请求的key不存在或者是新加的,就需要加锁从dirty中读取。所以,读取不存在的key会因为加锁而导致性能下降,读取还没有提升的新值的情况下也会因为加锁性能下降。
其中,missLocked增加miss的时候,如果miss数等于dirty长度,会将dirty提升为read,并将dirty置空。
func (m *Map) missLocked() {
m.misses++ // misses计数加一
if m.misses < len(m.dirty) { // 如果没达到阈值(dirty字段的长度),返回
return
}
m.read.Store(readOnly{m: m.dirty}) //把dirty字段的内存提升为read字段
m.dirty = nil // 清空dirty
m.misses = 0 // misses数重置为0
}
Delete方法
sync.map的第3个核心方法是Delete方法。在Go 1.15中欧长坤提供了一个LoadAndDelete的实现(go#issue 33762),所以Delete方法的核心改在了对LoadAndDelete中实现了。
同样地,Delete方法是先从read操作开始,原因我们已经知道了,因为不需要锁。
func (m *Map) LoadAndDelete(key interface{}) (value interface{}, loaded bool) {
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
if !ok && read.amended {
m.mu.Lock()
// 双检查
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended {
e, ok = m.dirty[key]
// 这一行长坤在1.15中实现的时候忘记加上了,导致在特殊的场景下有些key总是没有被回收
delete(m.dirty, key)
// miss数加1
m.missLocked()
}
m.mu.Unlock()
}
if ok {
return e.delete()
}
return nil, false
}
func (m *Map) Delete(key interface{}) {
m.LoadAndDelete(key)
}
func (e *entry) delete() (value interface{}, ok bool) {
for {
p := atomic.LoadPointer(&e.p)
if p == nil || p == expunged {
return nil, false
}
if atomic.CompareAndSwapPointer(&e.p, p, nil) {
return *(*interface{})(p), true
}
}
}
如果read中不存在,那么就需要从dirty中寻找这个项目。最终,如果项目存在就删除(将它的值标记为nil)。如果项目不为nil或者没有被标记为expunged,那么还可以把它的值返回。
最后,我补充一点,sync.map还有一些LoadAndDelete、LoadOrStore、Range等辅助方法,但是没有Len这样查询sync.Map的包含项目数量的方法,并且官方也不准备提供。如果你想得到sync.Map的项目数量的话,你可能不得不通过Range逐个计数。
总结
Go内置的map类型使用起来很方便,但是它有一个非常致命的缺陷,那就是它存在着并发问题,所以如果有多个goroutine同时并发访问这个map,就会导致程序崩溃。所以Go官方Blog很早就提供了一种加锁的方法,还有后来提供了适用特定场景的线程安全的sync.Map,还有第三方实现的分片式的map,这些方法都可以应用于并发访问的场景。
这里我给你的建议,也是Go开发者给的建议,就是通过性能测试,看看某种线程安全的map实现是否满足你的需求。
当然还有一些扩展其它功能的map实现,比如带有过期功能的timedmap、使用红黑树实现的key有序的treemap等,因为和并发问题没有关系,就不详细介绍了。这里我给你提供了链接,你可以自己探索。
思考题
-
为什么sync.Map中的集合核心方法的实现中,如果read中项目不存在,加锁后还要双检查,再检查一次read?
-
你看到sync.map元素删除的时候只是把它的值设置为nil,那么什么时候这个key才会真正从map对象中删除?
欢迎在留言区写下你的思考和答案,我们一起交流讨论。如果你觉得有所收获,也欢迎你把今天的内容分享给你的朋友或同事。