聪明的车+智慧的路 = 智能网联汽车
车路协同系统架构:
智能网联汽车先导实验与教学平台主要有智能车、智慧路网、模拟驾驶器、智慧管理系统等四大部分组成。
微型智能车

![]()
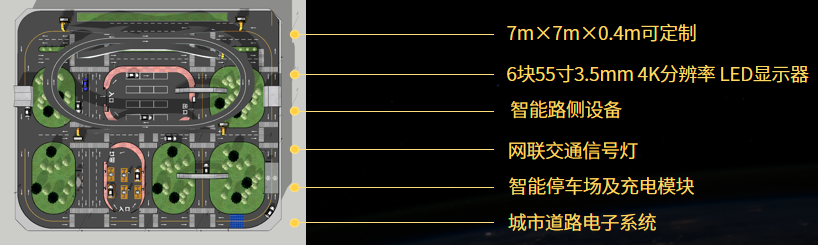
智慧路网

![]()
可定制不同交通路网环境,提供车辆位置信息读取,交通信号灯智能调度,停车位智能动态分配与充 电,具备各种道路设施(立交、隧道、匝道、潮汐道路等),以及各种道路标志标线等。
模拟驾驶

![]()
模拟有人驾驶车辆在智慧路网中行驶,实现有人驾驶与无人驾驶混合行驶, 用于测试智能车各种应急反应。
智慧管理

![]()
通过云服务端实时读取车辆与路网信息,实现多车动态管理,路径分配,集中调度,数据分析,车辆速度控制等。
微型智能车系统:
可实现自主导航、自主 构建高精度地图、 自主充电、自主避障、车车协同、车路协同等功能。
硬件架构:45cm×20cm×17cm (L×W×H);
车型采用1:10竞速级碳纤维RC车体可装配多种汽车悬挂;
车载六核决策处理芯片RK3399和32位STM32F103系列处理器;主频高达1.8GHZ;
传感器:IMU九轴传感器、高分辨率编码器、激光雷达、6 个红外测距传感器、单目视觉传感器、RFID;
执行器:直流减速电机、舵机、车载显示屏、多种接口等; 软件架构:在Linux下实施多任务调度(算法运算、通讯);
含 AGV 传感器角度输出接口;
含车辆变道控制接口;
含速度控制与角速度控制接口;
含车辆识别红绿灯信号接口;
含车辆角色设置与查询接口;
含车辆红外前后左右障碍物距离查询接口;
含车辆电量查询接口;
含车辆 IMU 数据查询接口;
含车辆激光雷达障碍物距离和角度输出接口;

![]()
微型智能车功能:
1.可实现车辆自主 OD 路径规划:用户可随机选择车辆的起讫点,当车辆在行驶 过程中遇到特殊情况,可以根据需要切换到辅助路径,显示大屏上会自动显 示路径规划的变化; 2.自主防撞系统:智能车利用各种先进的传感器技术来感知道路交通环境信息,在遇到突发状况(事故、拥堵、道路关闭)能自主进行制动或转向等避障措 施,并能将突发状况及时发送给后续车辆和中控系统; 3.通讯失灵情况下智能车安全行驶:当道路通讯设备、车辆的接受设备等模组 在部分失效或者被劫持的情况下,智能车还能具有一定安全自主运行能力, 智能车能够就近靠边停车或者驶入附近安全区域; 4.可实现车辆自动编队跟驰行驶:智能车能够自主实现多车编队行驶、跟驰 行驶; 5.可实现自动超车及换道:在满足安全超车或换道的提前下,智能车能够自主判断行驶路径; 6.可实现智能车自适应速度控制:定速巡航、以及按照限速指示牌速度行驶; 7.可实现车辆能够按照信号灯指示行、停:智能车能够接受红绿灯广播信号, 并能根据红绿灯状态控制智能车行驶状况(加速、减速、停止);

![]()

![]()

![]()
提供车辆控制 API 接口和传感器数据查询接口,方便高校师生进行二次开发; 可实现网联汽车软件算法的移植和验证,且算法运算周期控制在 1ms 以内;
智慧路网系统功能:
可定制不同的交通网络环境、提供车辆位置信息读取、交通信号灯智能调度、停车位智能动态分配与充电具备各种道路设施(公交、隧道、匝道、潮汐道路、十字路口、丁字路口、双向车道、环岛等)以及各种道路标志、标线等。 智慧路网系统:主要由功能展示层、路面层、路基层
![]()

![]()

![]()
智能路侧设备:
1.网联功能信号机 2.移动红绿灯 3.移动电子限速牌 4.抓拍摄像头 5.DSRC身份识别系统
网联交通红绿灯系统:
信号灯尺寸:长 0.4*宽 0.5*高 0.5m(可根据需要加装底部支架) 信号控制机具有完整的信号控制逻辑,具有输出端口,具有 12 个独立的机动车 灯组、4 个独立的行人灯组、最多可接 32 个检测器、双 RS232 通讯接口,具有 中心控制、感应控制功能,弱电共阳极输出; 红绿黄三色路口信号灯含箭头信号灯、倒计时器; 提供可视化界面,可现场监测运行状态、模拟路口、配置设备参数; 可实现独立控制、群控、指定相位放行、路线选择放行、自动报警信号机故障并自动降级运行等功能;
网联信号机方向(东、南、西、北)控制; 网联信号机相位设置(相位 1~16); 网联信号机相位周期设置; 网联信号机车流量检测,车速检测; 网联信号机的后台授时、滤波; 网联信号机数据记录备份与导出;
指标符合 GB25280-2016《道路交通信号控制机》的要求,具有公安部交通安 全产品质量监督检测中心的检测报告。
城市道路电子系统:
包含红绿灯控制系统、智能路灯照明系统、道路监控抓拍系统,电子测速系统、车流量监控系统、ETC 车收费系统等。 城市道路监控系统(支持有线、无线通讯模块可实现多车检测) 城市照明系统手动控制或自动控制光线强弱(双模式)

![]()
智能停车场及充电模块:
该平台包含 1 组智能泊车充电功能管理模块,可实现网联汽车在运行平台上的自主泊车,并完成非接触式电磁耦合方式无线充电。含停车场实时状态检测系统;停车场自动对接无线充电系统;停车场空余车位智能引导系统;车辆车牌识别计时收费系统;停车厂闸机自动控制系统;停车场车位提醒诱导系统;停车场视频监控系统等。 (1) 充电电流大于 600mA。 (2) 具备高温、过流、短路等多重保护。 (3) LED 显示充电电量和预计充电时间,尺寸不低于 5 寸。 (4) 停车场入口设有自动升降杆系统,且含 LED 显示屏(不低于 5 寸),具有停车位展示和管理功能

![]()
模拟驾驶系统:
用了仿真汽车驾驶座椅,包括转向控制系统、油门控制系统、刹车控制系统、硬件信号处理系统(ECU)、驾驶行为通信模块、全局跟踪系统等。由于现阶段无人驾驶车辆未能全部普及,存在有人驾驶与无人驾驶混行的交通状 况,研究人员通过模拟驾驶器实时控制智能车在智慧路网中行驶,模拟有人驾驶车辆可 能存在的驾驶行为,如突然减速,突然超车,加塞,来模拟无人驾驶车辆应急处理状态, 完成有人驾驶与无人驾驶编队实验,有人车干扰实验等应急反应。

![]()

![]()
智慧管理系统:
通过云服务端实时读取车辆与路网信息、实现多车动态管理、路径分配、集中调度、数据分析、车辆速度控制等
智慧管理调度决策系统:
智慧管理调度决策系统包含中控服务器、网络传输系统、配置软件系统等,可实现多车动态管理、路径分配,数据分析,速度控制,超车控制、角色划分,集中调度等综合控制。 参数指标: (1) CPU:INTEL 处理器、主频 3.0GHZ 以上、六核以上处理器。 (2) 内存:16G 以上内存,多个内存扩展槽支持扩展到 64G 内存。 (3) 硬盘:256G(SSD)以上+2T(SATA)以上。 (4) 显卡:16G 以上独立显卡(不低于 GTX1080-8G 型号)。 (5) 电源:360W 以上大功率电源,支持大功率独立显卡。 (6) 显示器:22 寸高分辨率宽屏液晶显示器。
中控调度显示系统 :
(1) 可实现不同屏幕之间的联动显示;
(2) 可以随时随地控制显示屏的开关机,以及任意分享显示内容。
网络传输硬件系统 : 交换机:全双工/半双工自适应传输模式,≥16 端口,≥10/100Mbps 传输速率,须满足或高于国家标准。串口服务器:≥4 接口,支持 TCP/IP,PPP 网络协议,采用 RS-232 网络接口类型, 须满足或高于国家标准。

![]()

![]()
智慧管理软件系统:
智慧管理软件系统安装在智慧管理调度决策系统上,能够将每一个车辆的实时状态 信息、智慧路网系统信息、智能路侧设备信息综合管理控制起来,它包含用户管理、高 精度地图加载、智能车加载、车辆路径在线规划、车路信息实时显示、单车传感器数据 实时显示、路侧设备在线管控、远程驾驶、真车无人驾驶系统数字孪生建模、自动驾驶 算法策略一键导入、无人驾驶算法评价系统以及比赛、无人驾驶系统教学实验等系统在 智慧管理软件平台上处理。
车路协同系统:
无人驾驶汽车依靠单车智能,短期内无法使其在真实的城市道路落地,采用车路协 同方案能够大大缩短无人驾驶技术落地时间。同时,它能够提升无人驾驶安全性、改善 交通拥堵、合理分配资源、节能改善环境。无人驾驶微缩车智能路网平台系统更方便让师生开展车路协同前瞻性的研究。 如:车辆自适应识别红绿灯、车辆自适应识别限速牌;交叉口盲区预警、车辆换道预警、车辆违反信号或停车标志警告;弯道车速预警、潮汐车道管理;车辆与移动路侧设备协同(车辆与无人机之间协同)等。

![]()

![]()