原文链接:https://blog.csdn.net/lilywri823/article/details/86583269
写在前言:如果你装不成功,never give it up,你需要的只是一个纯净的系统而已!很重要!!!
我装了好几遍,最后在纯净的系统上才成功的!因为原来装了很多软件的系统有些依赖或者库可能版本不太对应。
PCL(Point Cloud Library )点云库是一个开源的c++代码库,包含了大量的点云相关的通用算法和数据结构。在SLAM领域有着广泛的应用,安装方式有两种
方法一:官方的安装教程
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl sudo apt-get update sudo apt-get install libpcl-all
方法二:源码安装
上面那种安装方法会出现无法定位到libpcl-all package的问题,因此最最保守的是要采用源码安装方式。
1.先安装各种依赖
sudo apt-get update sudo apt-get install git build-essential linux-libc-dev sudo apt-get install cmake cmake-gui sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev sudo apt-get install mpi-default-dev openmpi-bin openmpi-common sudo apt-get install libflann1.8 libflann-dev sudo apt-get install libeigen3-dev sudo apt-get install libboost-all-dev
# 其他依赖
sudo apt-get install libqhull* libgtest-dev sudo apt-get install freeglut3-dev pkg-config sudo apt-get install libxmu-dev libxi-dev sudo apt-get install mono-complete sudo apt-get install libopenni-dev sudo apt-get install libopenni2-dev
2.源码安装vtk库(很重要!!!apt安装的方式会出现.so文件缺失的情况!)
2.1首先安装依赖项X11,OpenGL,CMake-gui
#x11
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
# OpenGL
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev
# cmake
sudo apt-get install cmake cmake-gui
2.2下载vtk源码,官网 Download | VTK,我选择了VTK-7.1.1.zip,
百度网盘地址
链接:https://pan.baidu.com/s/10MFUtJrZyaQKi8_Q34psCw
提取码:j6ww
下载完成后解压缩到你的文件安装目录。在文件目录下打开cmd窗口,输入cmake-gui打开cmake图形界面:
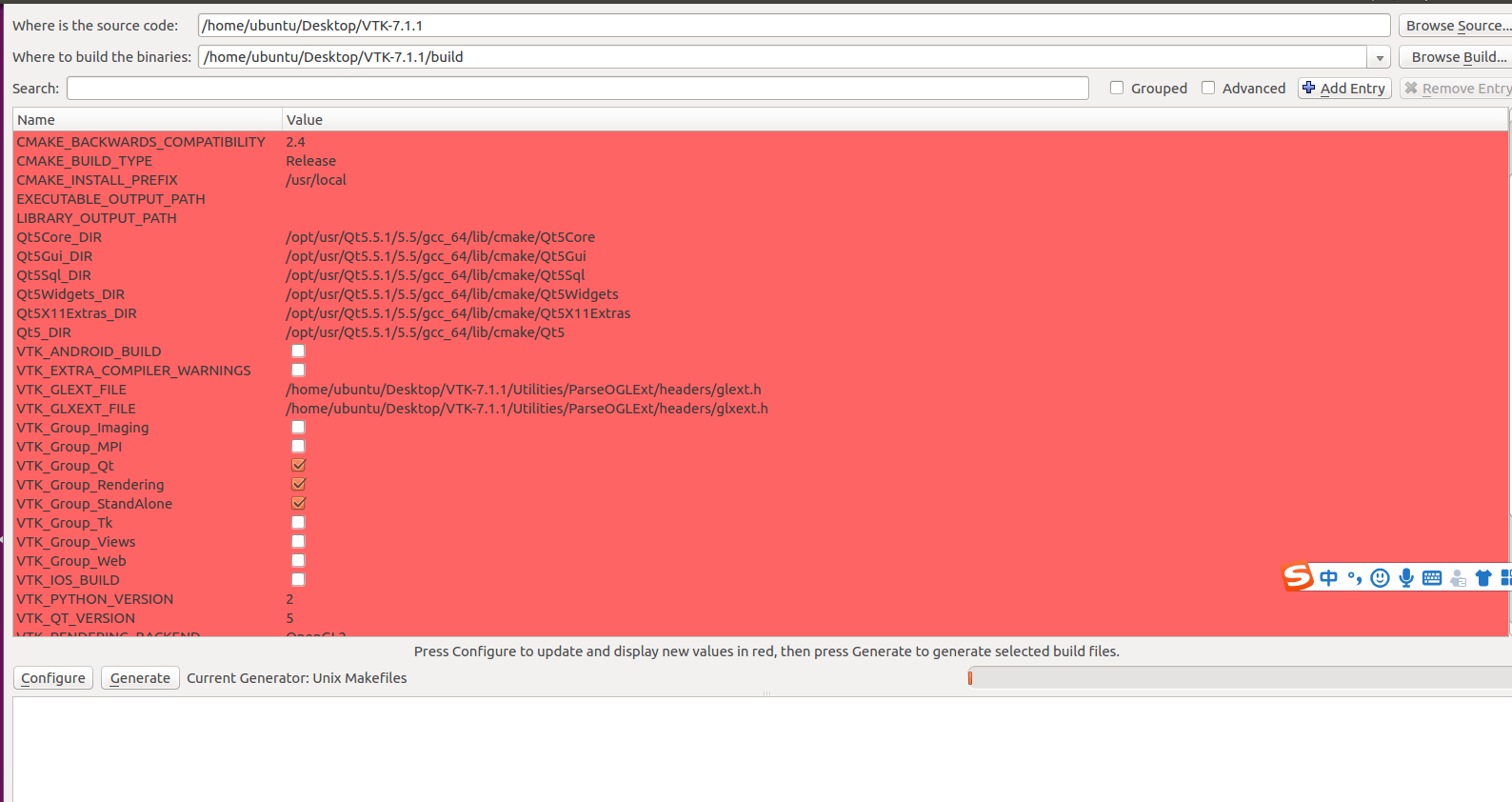
配置“where is the source code”的路径为vtk-7.1.1所在的目录
在vtk-7.1.1目录新建build文件夹,配置“where to build the binaries”为build文件夹
点击Configure,配置完成后提示configure done
1.选VTK_Group_Qt选项
2.将CMAKE_BUILD_TYPE改为Release
再次点击configure
如果使用QT5,修改VTK_QT_VERSION改为5
注意QT5路径要修改为使用的QT5的路径 (终端中使用 qmake -v 查看路径,Ubuntu1604默认的是QT4.8.7,需要修改默认的QT,参考 ubuntu QT 默认版本路径更改)
我安装的路径是在 /opt/usr/Qt5.5.1
配置完成后点击generate按钮,会在build文件夹下生成工程文件
2.3 切换文件目录到vtk-7.1.1文件夹下的build文件夹,然后打开cmd窗口,输入:
make sudo make install
完成vtk库的安装.
3.安装pcl
pcl官方github https://github.com/PointCloudLibrary/pcl.git 下载需要的pcl版本,我安装的是1.11.1版本
或者百度网盘
链接:https://pan.baidu.com/s/1gjTubzLFv6wBa1TTxCuM3Q
提取码:sqvm
git clone https://github.com/PointCloudLibrary/pcl.git
cd pcl mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=None ..
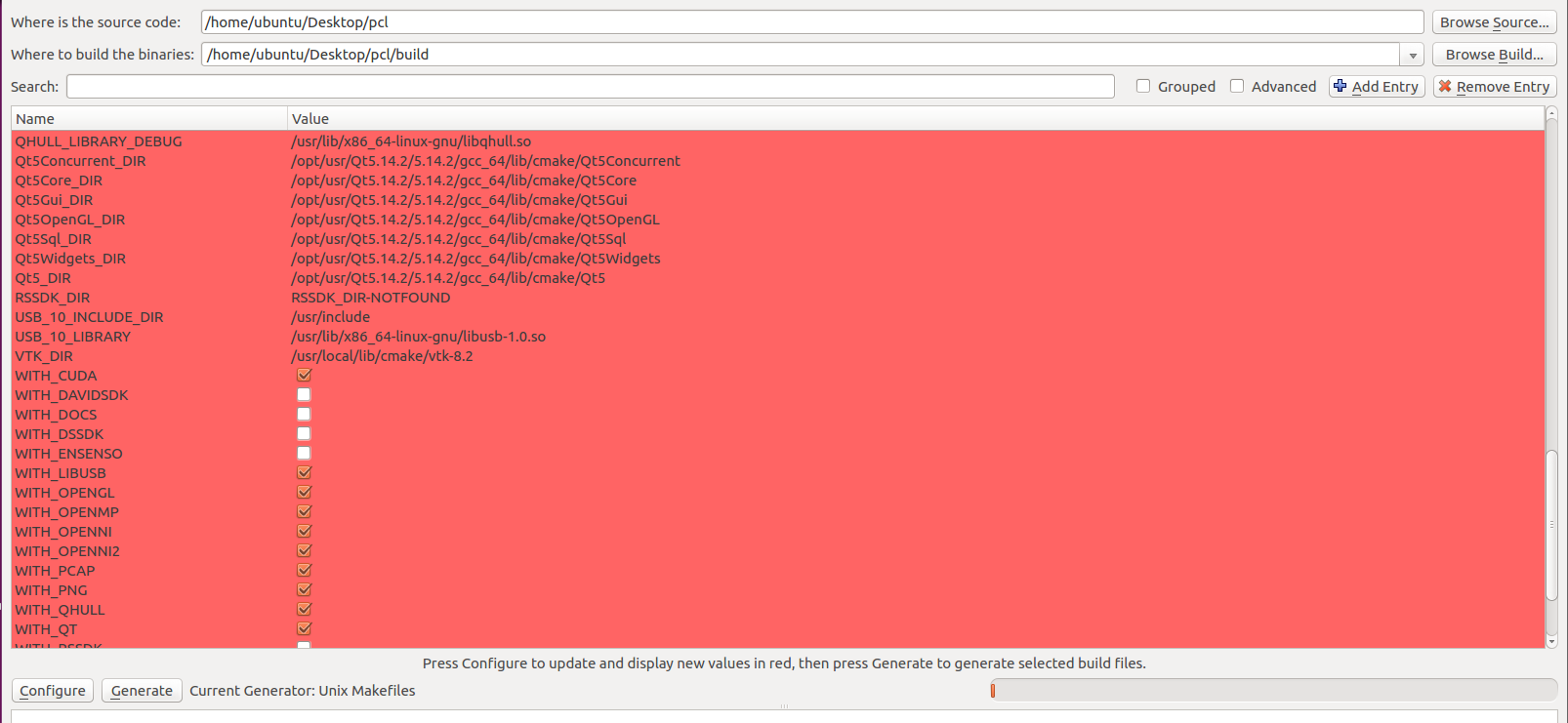
cmake-gui ..
检查Qt的路径,检查vtk版本,点击Configure,generate
编译源码,过程极其漫长,可以去喝杯茶,看看电影了。。。
make
编辑结束后,安装
sudo make install
4.pcl 测试
测试代码pcl_test.cpp如下:
#include <iostream> #include <pcl/common/common_headers.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/visualization/cloud_viewer.h> #include <pcl/console/parse.h> int main(int argc, char **argv) { std::cout << "Test PCL !!!" << std::endl; pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>); uint8_t r(255), g(15), b(15); for (float z(-1.0); z <= 1.0; z += 0.05) { for (float angle(0.0); angle <= 360.0; angle += 5.0) { pcl::PointXYZRGB point; point.x = 0.5 * cosf (pcl::deg2rad(angle)); point.y = sinf (pcl::deg2rad(angle)); point.z = z; uint32_t rgb = (static_cast<uint32_t>(r) << 16 | static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b)); point.rgb = *reinterpret_cast<float*>(&rgb); point_cloud_ptr->points.push_back (point); } if (z < 0.0) { r -= 12; g += 12; } else { g -= 12; b += 12; } } point_cloud_ptr->width = (int) point_cloud_ptr->points.size (); point_cloud_ptr->height = 1; pcl::visualization::CloudViewer viewer ("test"); viewer.showCloud(point_cloud_ptr); while (!viewer.wasStopped()){ }; return 0; }
CMakeLists.txt文件:(直接输入以下代码)
cmake_minimum_required(VERSION 2.6) project(pcl_test) find_package(PCL 1.2 REQUIRED) include_directories(${PCL_INCLUDE_DIRS}) link_directories(${PCL_LIBRARY_DIRS}) add_definitions(${PCL_DEFINITIONS}) add_executable(pcl_test pcl_test.cpp) target_link_libraries (pcl_test ${PCL_LIBRARIES}) install(TARGETS pcl_test RUNTIME DESTINATION bin)
把pcl_test.cpp和CMakeLists.txt发在同一个文件夹后
再在该文件夹下新建build文件夹并在终端打开
执行如下命令:
cmake . make ./pcl_test

就可以看到一个漂亮的3D模型

如果打开的是红色的框,用鼠标滚轮进行缩小即可。