这篇博客是pcl中区域增长的算法进行简介以实现重写,并添加了一些判断条件。
起初原因是在使用pcl封装的regionGrowing时,效果不太好。
于是想自己重新写一下,通过改变其中种子点的生成策略和生长区域判别条件。
但是,完成之后效果依旧很差 ( ̄▽ ̄)"!
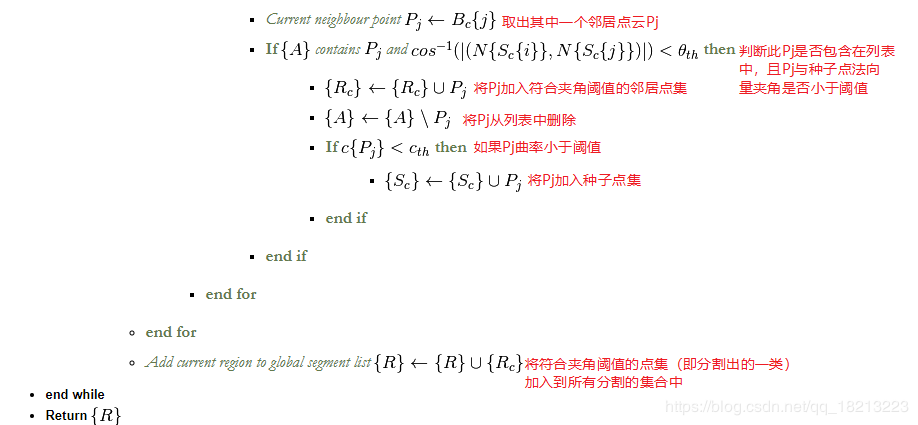
以下两张图片是在网上找到pcl官网中对regionGrowing伪代码的介绍以及翻译:
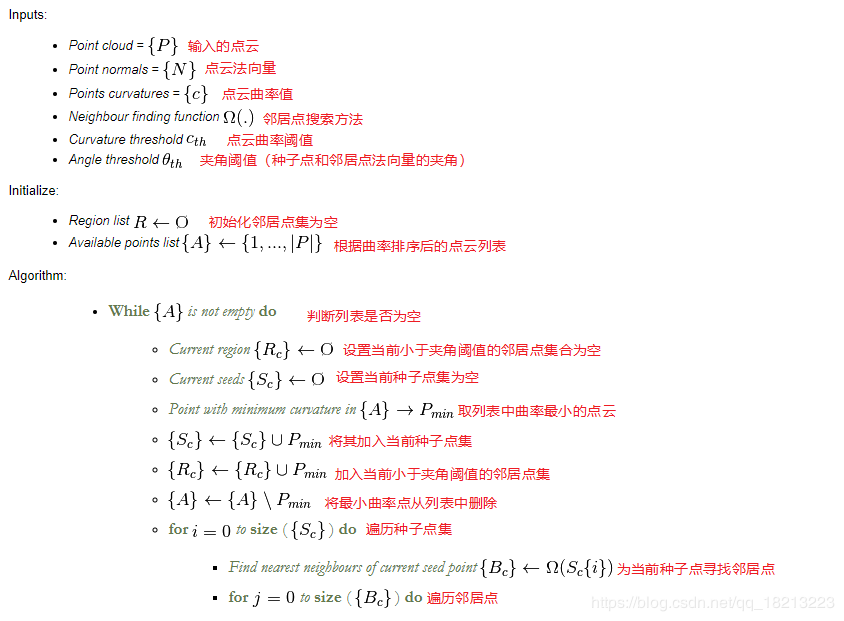
我在复现过程中,主要是对新种子点的生成更改了判别条件,比如按照法向量夹角、距离阈值等。
此外,在区域生长过程中点的判别,可以增加角度阈值、欧式距离阈值、曼哈顿距离阈值等判别条件。
主要是根据自己点云数据的特点,对参数进行修改。
毕竟大多数我们只是一个调参侠(o´・ェ・`o)
PS:因为不可抗拒性因素,本次代码就不上传了,因为有伪代码大家肯定都能写出来。
// 开学快一周了,虽然暑假没回家(没成果的人不配回家)。
// 但是最近两个月总是一堆乱七八糟的事情,确实没把时间好好利用起来。
// 科研做起来很没有意思,最近看师兄师姐找工作,该去LeetCode刷题了。