本文转自EasyDarwin开源团队成员Alex的博客:http://blog.csdn.net/cai6811376/article/details/51912692
近日,EasyDarwin云平台加入云台控制功能,完善了云平台的功能,提升了用户体验。具体设计以及实现如下。
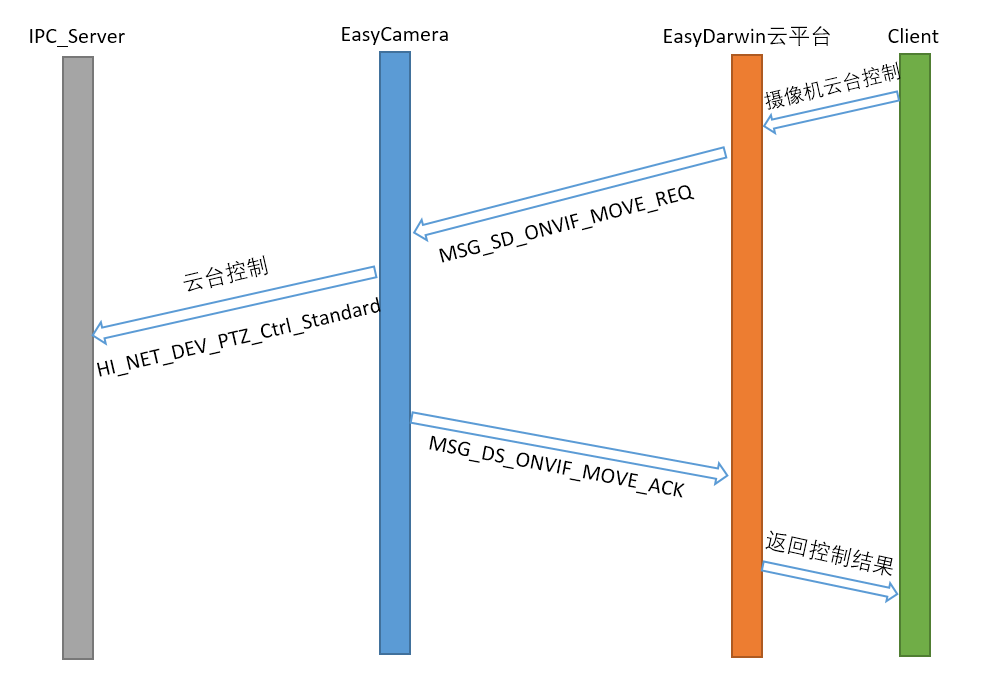
流程设计
客户端通过RESTful接口向云平台发送控制命令;
云平台组织控制报文向设备发送;
设备执行后向云平台返回控制响应报文;
云平台接收响应报文后将控制结果返回给客户端。
- 接口设计
首先我们设计云台控制的接口,接口为RESTful方式接口。
http://[ip]:[port]/api/ptzcontrol?device=001001000058&channel=0&actiontype=single&c
ommand=down&speed=5&protocol=onvifdevice: 设备序列号;
channel: 通道;
protocol: 控制模式, 包括 Onvif、 SDK;
actiontype: ptz 控制模式, 分为连续( Continuous)、 单步( Single);
command: ptz 控制命令包括转动、 变焦等,
stop/up/down/left/right/zoomin/zoomout/focusin/focusout/aperturein/apertureout;
speed: ptz 控制速度。
- 通讯报文设计
//云平台响应客户端控制
{
"EasyDarwin" : {
"Body" : {
"Channel" : "0",
"Protocol" : "ONVIF",
"Reserve" : "1",
"Serial" : "001001000058"
},
"Header" : {
"CSeq" : "2",
"ErrorNum" : "200",
"ErrorString" : "Success OK",
"MessageType" : "MSG_SC_PTZ_CONTROL_ACK",
"Version" : "1.0"
}
}
}//云平台向设备发送控制报文
{
"EasyDarwin" : {
"Body" : {
"ActionType" : "SINGLE",
"Channel" : "0",
"Command" : "DOWN",
"From" : "f6a221eec46b47dea8ae1a2bd11f8d02",
"Protocol" : "ONVIF",
"Reserve" : "1",
"Serial" : "001001000058",
"Speed" : "5",
"To" : "245d6ec33cd247b7b7524219552db4d8",
"Via" : "27823d2e8b6b4032b453d435a16b7be8"
},
"Header" : {
"CSeq" : "1",
"MessageType" : "MSG_SD_CONTROL_PTZ_REQ",
"Version" : "1.0"
}
}
}//设备响应云平台控制
{
"EasyDarwin" : {
"Body" : {
"Channel" : "0",
"From" : "245d6ec33cd247b7b7524219552db4d8",
"Protocol" : "ONVIF",
"Reserve" : "1",
"Serial" : "001001000058",
"To" : "f6a221eec46b47dea8ae1a2bd11f8d02",
"Via" : "27823d2e8b6b4032b453d435a16b7be8"
},
"Header" : {
"CSeq" : "1",
"ErrorNum" : "200",
"ErrorString" : "Success OK",
"MessageType" : "MSG_DS_CONTROL_PTZ_ACK",
"Version" : "1.0"
}
}
}格式说明:
Serial:设备序列号;
Channel: 摄像机通道号;
Protocol: 指定 ptz 控制方式, ONVIF 协议或者设备 SDK;
ActionType: ptz 控制类型, 包括连续或者单步;
Command: ptz 控制命令, 包括停止, 上下左右旋转, 变焦等等;
Speed: ptz 控制速度;
From: EasyCMS 接收 Client 访问的 SessionID;
To: EasyCMS 向 Device 发送报文的 SessionID;
Via: EasyCMS 的 ServiceID;
- 实现
//EasyCMS HTTPSession.cpp
//在session map中查找device session,组织控制报文,通过device session发送给设备
OSRefTableEx* deviceMap = QTSServerInterface::GetServer()->GetDeviceSessionMap();
OSRefTableEx::OSRefEx* theDevRef = deviceMap->Resolve(chSerial);
if (theDevRef == NULL)
return EASY_ERROR_DEVICE_NOT_FOUND;
OSRefReleaserEx releaser(deviceMap, chSerial);
HTTPSession* pDevSession = static_cast<HTTPSession *>(theDevRef->GetObjectPtr());
EasyProtocolACK reqreq(MSG_SD_CONTROL_PTZ_REQ);
EasyJsonValue headerheader, bodybody;
char chTemp[16] = { 0 };
UInt32 uDevCseq = pDevSession->GetCSeq();
sprintf(chTemp, "%d", uDevCseq);
headerheader[EASY_TAG_CSEQ] = string(chTemp);
headerheader[EASY_TAG_VERSION] = EASY_PROTOCOL_VERSION;
string strProtocol(chProtocol);
string strActionType(chActionType);
string strCmd(chCmd);
boost::to_upper(strProtocol);
boost::to_upper(strActionType);
boost::to_upper(strCmd);
bodybody[EASY_TAG_SERIAL] = chSerial;
bodybody[EASY_TAG_CHANNEL] = chChannel;
bodybody[EASY_TAG_PROTOCOL] = strProtocol;
bodybody[EASY_TAG_RESERVE] = chReserve;
bodybody[EASY_TAG_ACTION_TYPE] = strActionType;
bodybody[EASY_TAG_CMD] = strCmd;
bodybody[EASY_TAG_SPEED] = chSpeed;
bodybody[EASY_TAG_FROM] = fSessionID;
bodybody[EASY_TAG_TO] = pDevSession->GetValue(EasyHTTPSessionID)->GetAsCString();
bodybody[EASY_TAG_VIA] = QTSServerInterface::GetServer()->GetCloudServiceNodeID();
reqreq.SetHead(headerheader);
reqreq.SetBody(bodybody);
string buffer = reqreq.GetMsg();
StrPtrLen theValue(const_cast<char*>(buffer.c_str()), buffer.size());
pDevSession->SendHTTPPacket(&theValue, false, false);//EasyCamera EasyCMSSession.cpp processControlPTZReq
//EasyCamera接收控制报文,调用EasyCameraSource的控制接口
QTSS_Error EasyCMSSession::processControlPTZReq() const
{
EasyMsgSDControlPTZREQ ctrlPTZReq(fContentBuffer);
string serial = ctrlPTZReq.GetBodyValue(EASY_TAG_SERIAL);
string protocol = ctrlPTZReq.GetBodyValue(EASY_TAG_PROTOCOL);
string channel = ctrlPTZReq.GetBodyValue(EASY_TAG_CHANNEL);
string reserve = ctrlPTZReq.GetBodyValue(EASY_TAG_RESERVE);
string actionType = ctrlPTZReq.GetBodyValue(EASY_TAG_ACTION_TYPE);
string command = ctrlPTZReq.GetBodyValue(EASY_TAG_CMD);
string speed = ctrlPTZReq.GetBodyValue(EASY_TAG_SPEED);
string from = ctrlPTZReq.GetBodyValue(EASY_TAG_FROM);
string to = ctrlPTZReq.GetBodyValue(EASY_TAG_TO);
string via = ctrlPTZReq.GetBodyValue(EASY_TAG_VIA);
if (serial.empty() || channel.empty() || command.empty())
{
return QTSS_ValueNotFound;
}
QTSS_RoleParams params;
params.cameraPTZParams.inActionType = EasyProtocol::GetPTZActionType(actionType);
params.cameraPTZParams.inCommand = EasyProtocol::GetPTZCMDType(command);
params.cameraPTZParams.inSpeed = EasyUtil::String2Int(speed);
QTSS_Error errCode = QTSS_NoErr;
UInt32 fCurrentModule = 0;
UInt32 numModules = QTSServerInterface::GetNumModulesInRole(QTSSModule::kControlPTZRole);
for (; fCurrentModule < numModules; ++fCurrentModule)
{
QTSSModule* theModule = QTSServerInterface::GetModule(QTSSModule::kControlPTZRole, fCurrentModule);
errCode = theModule->CallDispatch(Easy_ControlPTZ_Role, ¶ms);
}
EasyJsonValue body;
body[EASY_TAG_SERIAL] = serial;
body[EASY_TAG_CHANNEL] = channel;
body[EASY_TAG_RESERVE] = reserve;
body[EASY_TAG_PROTOCOL] = protocol;
body[EASY_TAG_FROM] = to;
body[EASY_TAG_TO] = from;
body[EASY_TAG_VIA] = via;
EasyMsgDSControlPTZACK rsp(body, ctrlPTZReq.GetMsgCSeq(), getStatusNo(errCode));
string msg = rsp.GetMsg();
StrPtrLen jsonContent(const_cast<char*>(msg.data()));
HTTPRequest httpAck(&QTSServerInterface::GetServerHeader(), httpResponseType);
if (httpAck.CreateResponseHeader())
{
if (jsonContent.Len)
httpAck.AppendContentLengthHeader(jsonContent.Len);
//Push msg to OutputBuffer
char respHeader[2048] = { 0 };
StrPtrLen* ackPtr = httpAck.GetCompleteHTTPHeader();
strncpy(respHeader, ackPtr->Ptr, ackPtr->Len);
fOutputStream->Put(respHeader);
if (jsonContent.Len > 0)
fOutputStream->Put(jsonContent.Ptr, jsonContent.Len);
}
return errCode;
}//EasyCamera EasyCameraSource.cpp ControlPTZ
QTSS_Error EasyCameraSource::ControlPTZ(Easy_CameraPTZ_Params* params)
{
QTSS_Error result = QTSS_RequestFailed;
if (cameraLogin())
{
HI_S32 error;
if (params->inActionType == EASY_PTZ_ACTION_TYPE_CONTINUOUS)
{
error = HI_NET_DEV_PTZ_Ctrl_Standard(m_u32Handle, getPTZCMDFromCMDType(params->inCommand), params->inSpeed);
}
else if (params->inActionType == EASY_PTZ_ACTION_TYPE_SINGLE)
{
error = HI_NET_DEV_PTZ_Ctrl_StandardEx(m_u32Handle, getPTZCMDFromCMDType(params->inCommand));
}
else
{
return QTSS_BadArgument;
}
if (error == HI_SUCCESS)
{
result = QTSS_NoErr;
}
else
{
result = QTSS_RequestFailed;
}
}
return result;
}获取更多信息
Github:https://github.com/easydarwin
Copyright © EasyDarwin.org 2012-2016
