三角函数公式
参考:https://blog.csdn.net/pipisorry/article/details/52200313
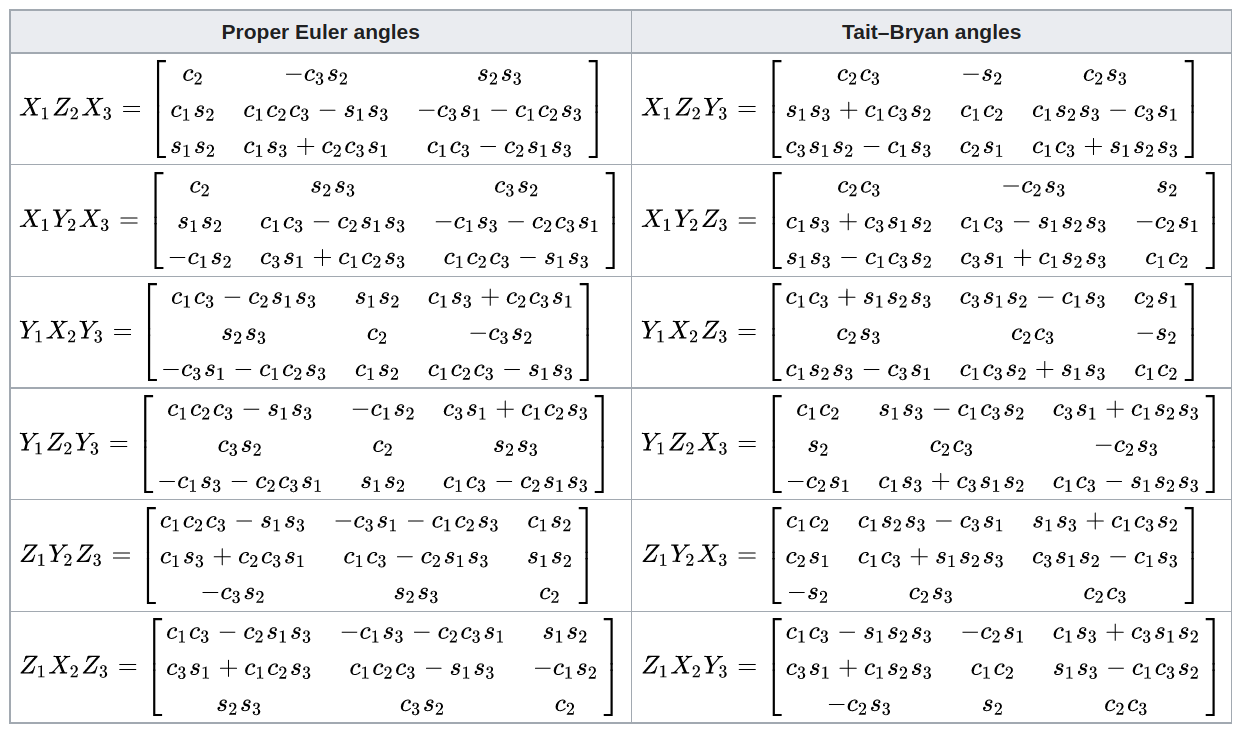
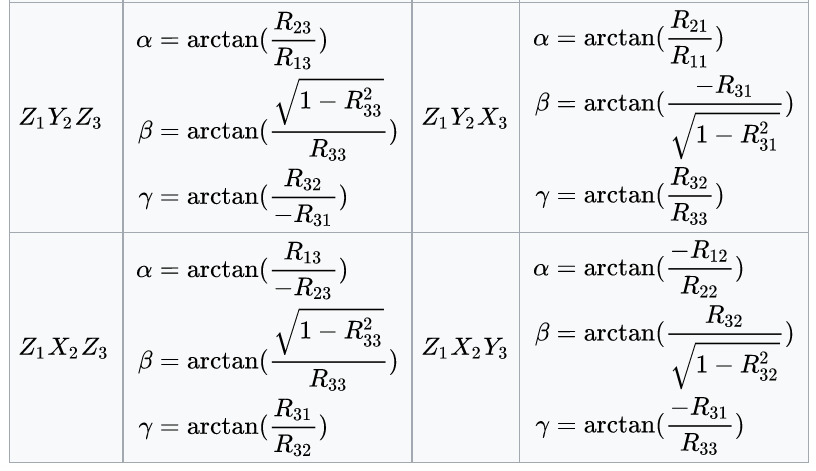
欧拉角与旋转矩阵


欧拉公式证明:


数值方法解出的近似旋转矩阵,SVD转化为正交的标准旋转矩阵 旋转矩阵标准化 正交矩阵
参考链接:https://zhuanlan.zhihu.com/p/104735380
参考视频课:https://www.bilibili.com/video/BV1ax411R7Hd?p=20
在谭平老师(SFU)在浙江大学的计算机视觉的公开课(强烈推荐讲的很好,链接如上)中听到了这个问题,在这里记录一下:
在求解涉及旋转的优化问题过程中,通过解线性方程组或者采用优化方法得到的旋转矩阵的数值解,往往没有考虑到正交约束,会得到一个存在误差的近似旋转矩阵,也就是说这个矩阵并不是一个严格正交的标准正交矩阵,不满足。因此,需要将矩阵近似为最接近的正交矩阵。
处理方法:采用SVD分解近似旋转矩阵,然后将奇异值矩阵用单位阵替代即可,得到
Matlab简单的示例如下
% Standard Rotation Matrix R = [0.0115185, 0.999321, 0.0351458; -0.998647, 0.00971046, 0.051195; 0.0508185, -0.0356881, 0.998074]; % S is identity matrix [U, S, V] = svd(R); % Rotation Matrix Solved without Constraint (Error) R1 = [0.01, 0.99, 0.03; -0.99, 0.01, 0.05; 0.05, -0.03, 0.99]; % S1 is not identity matrix [U1, S1, V1] = svd(R1); % Approximate Matrix R2 = U1 * V1'; % S2 is identity matrix [U2, S2, V2] = svd(R2);
这里还要注意一个问题,之前也遇到过。处理完以后得到的 R 不一定就是旋转矩阵,因为旋转矩阵是行列式值为1的正交矩阵,而正交矩阵的行列式值为。因此还要检验 R 的行列式是否为1,如果是-1,则得到了一个Reflection,需要将奇异值矩阵(单位阵)的最后一列的1置为-1,这样得到的 R 就是旋转矩阵了,这个处理方式参考了https://zhuanlan.zhihu.com/p/104735380,以及Arun 的经典文章 Least-Squares Fitting of Two 3-D Point Sets,这种情况在求解两组三维点相对位姿时有时会出现。