第一种算法的伪代码来自:https://www.bilibili.com/video/BV1Ut41197ae?from=search&seid=7706418527991382536
========== 第一种算法
一,把 点集 分成两组
(1) S:已求出的最短路径的点的集合
(2) T = V - S:尚未确定的点的集合
保证:
①,从源点 V0 到 S 中各点的 最短路径 的长度都不大于从
V0 到 T 中任何点的最短路径长度
②,每点赋予一个值
S:从 V0 到此点 最短路径长度
T:从 V0 到此点 只包括 S 中的点作中间点 的最短路径长度
另外,S 和 T 中点的 长度都用 数组D 存
二,步骤
1,初始化
S={ V0 },T={ 其他点 }
D[ i ] 初值:若< V0,Vi > 存在,则为其权值,否则 为 无穷大
即:找出 源点V0 到 各点的直达路径,即只通过一条弧就 到达的路径
2,选择:从这些路径中找出一条最短路径 (V0,Vi) ,并将 Vi 加入 S
3,更新
对 T 中 点的距离 进行修改:若加入 Vj 作为 中间点,使得 V0 Vj Vi 小于 V0 Vi,
则修改距离值。
4,重复 2,3 操作,直到 S = V
三,例题
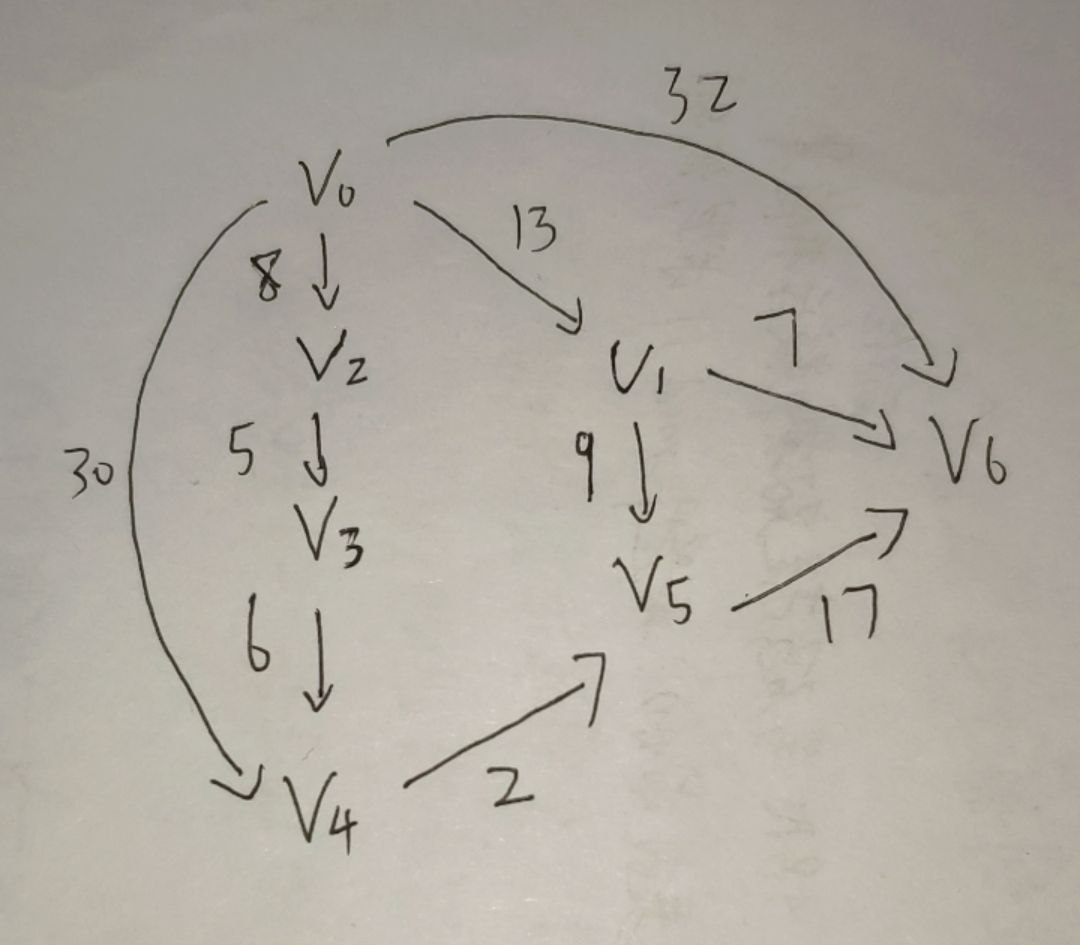
1,

2,其实我们书本上的和这个差不多原理,不过看你起来更简洁
四,代码
1,这个代码完全是按照上面的步骤,其中的测试数据 亦是上面例题的第一题的那种画法
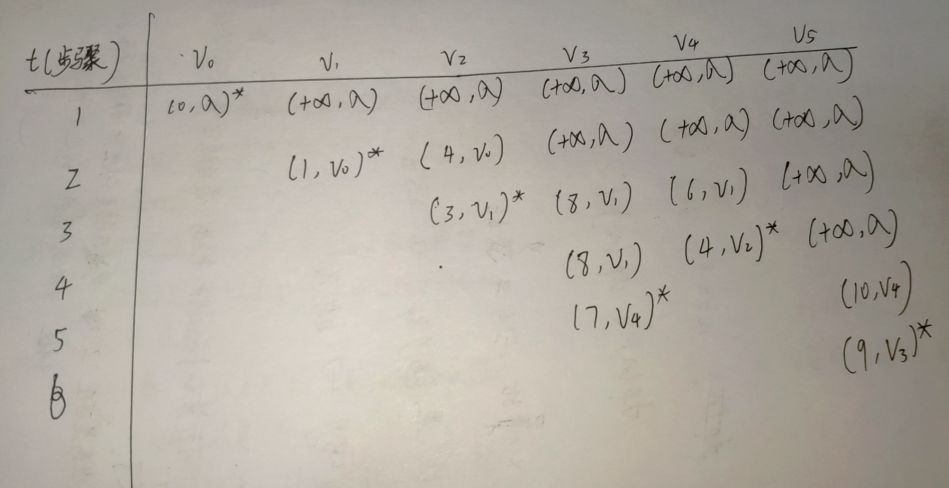
其实 真的可以画一下那个表格,步骤一模一样


#define _CRT_SECURE_NO_WARNINGS #include<stdio.h> #include<stdlib.h> #include<string.h> #define MIN(x,y) (((x)<(y))?(x):(y)); #define mem(a,b) memset(a,b,sizeof(a)) #define inf 0x3f3f3f3f #define N 1005 #define M 100005 int a[N][N]; // 存边 int dis[N]; // 刚开始是存 T中点的长度,然后到最后变成 源点到各点的最短距离 bool vis[N]; // 标记 点 是否已经加入 S 中 int p[N]; // 存路径 int n, m; // n 是点数,m 是边数, void init() { mem(p, 0); mem(vis, 0); for (int i = 0; i < n; i++) { for (int j = 0; j < n; j++) { if (a[i][j] == 0) a[i][j] = inf + 1; // 不存在这条边 } } } void dij(int src) { init(); vis[src] = 1; for (int i = 0; i < n; i++) // 1, 初始化 即找出 源点V0 到 各点的直达路径 { dis[i] = a[src][i]; p[i] = src; } p[src] = -1; for (int i = 1; i < n; i++) // 4,重复 2,3 操作,直到 S = V (把 S=V 换成确定的循环次数,除 源点 不用找最短路径,其他都要 { int min = inf, kmin = src; for (int j = 1; j < n; j++) // 2,选择:从这些路径中找出一条最短路径 (V0,Vi) ,并将 Vi 加入 S { if (vis[j] == 1) // 判断 这点 是否在 S 中,即 这点的最短路径 是否确定 continue; if (min > dis[j]) { min = dis[j]; kmin = j; } } vis[kmin] = 1; // 标记确定的点,即 将 点 加入 S 中 for (int j = 1; j < n; j++) //3,更新 对 T 中 点的距离 进行修改:若加入 Vj 作为 中间点,使得 V0 Vj Vi 小于 V0 Vi,则修改距离值。 { if (vis[j] == 1) continue; if (dis[j] > dis[kmin] + a[kmin][j]) { p[j] = kmin; dis[j] = dis[kmin] + a[kmin][j]; } } } } void show(int end) { if (p[end] != -1) show(p[end]); if (p[end] == -1) printf("%d", end); else printf("->%d", end); } int main(void) { int i, j, w; scanf("%d%d", &n, &m); for (int k = 0; k < m; k++) { scanf("%d%d%d", &i, &j, &w); a[i][j] = w; } dij(0); for (int i = 1; i < n; i++) { printf("%d ", dis[i]); }puts(""); printf("起点 到 v4 最短路径路线:"); show(4); puts(""); printf("起点 到 v6 最短路径路线:"); show(6); puts(""); system("pause"); return 0; } /* 7 10 0 2 8 2 3 5 3 4 6 0 4 30 0 1 13 1 6 7 1 5 9 4 5 2 5 6 17 0 6 32 */
============= 第二种算法
是用优先队列做的,这里不多解释。 之前我有讲过,可以移步 https://www.cnblogs.com/asdfknjhu/p/12538668.html
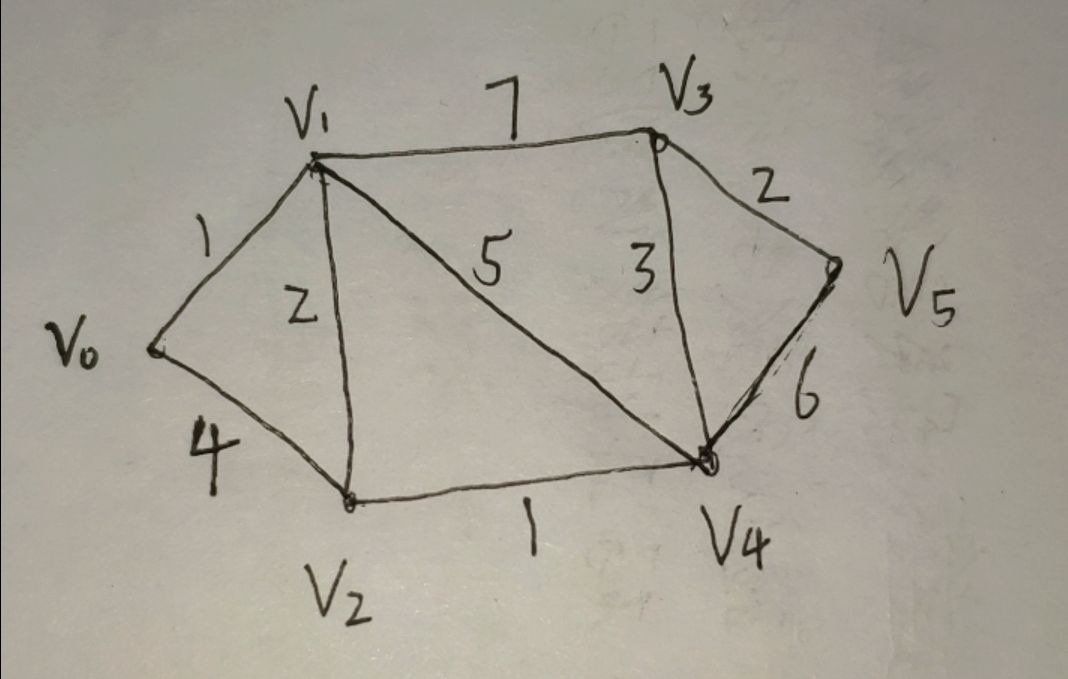
#define _CRT_SECURE_NO_WARNINGS #include<stdio.h> #include<stdlib.h> #include<queue> using namespace std; #define N 100 typedef struct Edge { int to; int w; int pre; }eg; eg e[N]; typedef struct node // 队列里要放的应该是 点的 id 和 distance ,而不是一条边 { int id; int dis; node() {} node(int a, int b) :id(a), dis(b) {} friend bool operator <(const node &a,const node &b) // < 的重载 { return a.dis > b.dis; } }st; /* typedef struct node // 队列里要放的应该是 点的 id 和 distance ,而不是一条边 { int id; int dis; node() {} node(int a, int b) :id(a), dis(b) {} bool operator <(const node &a)const // < 的重载 { return a.dis < dis; } }st;*/ int tot = 0, last[N], vis[N]; int dist[N], p[N]; // 记录距离和前一个点的 id void add(int from, int to, int w) { tot++; e[tot].to = to; e[tot].w = w; e[tot].pre = last[from]; last[from] = tot; } void Dijkstra(int start) { priority_queue <st>q; // 小于号的重载是对于优先队列 来说 q.push(st(start, 0)); // 起点为 1 dist[start] = 0, p[start] = -1; while (q.size()) { st vertex = q.top(); q.pop(); vis[vertex.id] = 1; // 出栈的时候标记 for (int i = last[vertex.id]; ~i; i = e[i].pre) //遍历这个点相邻的边 { st next = { e[i].to,e[i].w + vertex.dis }; if (vis[next.id] == 0)//如果下一个点还没有走过 { if (dist[next.id] > next.dis) //如果新来的点距离更近 更新 距离和前一个点的 id, { p[next.id] = vertex.id; dist[next.id] = next.dis; q.push(next); } } } } } void show(int end) { if (p[end] != -1) show(p[end]); printf("%d ", end); } int main(void) { int n; scanf("%d", &n); memset(last, -1, sizeof(last)); memset(vis, 0, sizeof(vis)); memset(dist, 0x3f, sizeof(dist)); tot = 0; while (n--) { int from, to, w; // 起点 终点 权值 scanf("%d%d%d", &from, &to, &w); add(from, to, w); add(to, from, w); // 无向图 } Dijkstra(1); // 起点 printf("路线:"); show(6); //终点 printf(" 距离:%d ", dist[6]); system("pause"); return 0; } /* 测试数据 8 1 2 5 1 3 1 2 3 2 2 4 1 3 4 4 3 5 8 4 5 3 4 6 6 */
最后总结一下,这个是看书的,我可不懂这些
第一种: 用 邻接矩阵 存图,这里邻接矩阵适合 点少边多的稠密图。 但这种算法适合 点多边少的稠密图,复杂度 O ( V*V)
第二种:用 链式前向星 存图 (书里用邻接表,不过我感觉差不多,不太确定)。这种算法 适合 边少点多的稀疏图,复杂度 O ( V + E logV )
========= ======== ======== ====== ====== ===== ==== === == =
人没有牺牲就什麽都得不到,为了得到什麽东西,就需要付出同等的代价。
—— 钢炼