ref:https://leijiezhang001.github.io/MOT-%E7%BB%BC%E8%BF%B0-Multiple-Object-Tracking-A-Literature-Review/
这篇文章比较广义,不是针对3D tracking的,知识互通,可以学习一下。
本文的主要贡献点如下四条:1)多目标跟踪系统的关键方向,包括公式(formulation),分类(categorization),关键原则(key principles),以及测评(evaluation);2)根据现有技术所属的不同方向来进行讨论,再将每个方向的方法划分为成组,然后对组内方法的原则、优缺点进行讨论;3)检验现有公开的实验并且总结在主流数据集上的实验结果,再进行量化地对比,与此同时指出分析中发现的几个有趣的问题;4)提供在MOT研究中会遇到的问题的讨论,以及可能在以后的工作中会出现的潜在可研究方向。
MOT作为一个中层任务,是一些高层任务的基础,比如行人的pose estimation,action recognition,behavior analysis,车辆的state estimation。
SOT(单目标跟踪)主要关注appearance model以及motion model的设计,解决尺度、旋转、光照等影响因素。而MOT包含两个任务:目标数量以及目标ID,这就要求MOT还需要解决其他问题:
frequent occlusions;
initialization and termination of tracks;
similar appearance;
interactions among multiple objucts;
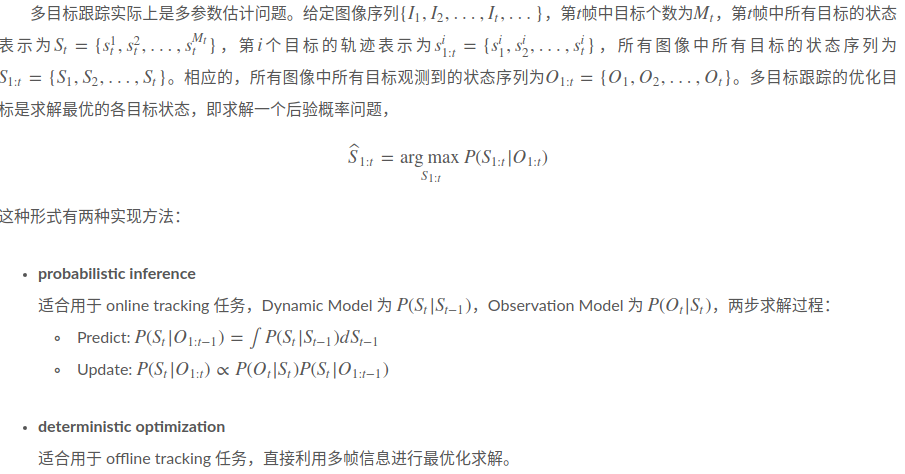
1 问题描述
2 分类方法
- initialization method
初始化方式分为:
∘∘ Detection-Based Tracking,优势明显,除了只能处理特定的目标类型;
∘∘ Detection-Free Tracking,能处理任何目标类型; - processing mode
根据是否使用未来的观测,处理方式可分为:
∘∘ online tracking,适合在线任务,缺点是观测量会比较少;
∘∘ offline tracking,输出结果存在时延,理论上能获得全局最优解; -
type of output
根据问题求解方式输出是否存在随机性:
∘∘ probabilistic inference,概率性推断;
∘∘ deterministic inference,求解最大后验概率;自动驾驶等在线任务主要关注 Detection-Based,online tracking。
3 框架
MOT主要考虑两个问题:
目标在不同帧之间的相似度量,即对appearance,motion,interaction,exclusion,occlusion的建模。
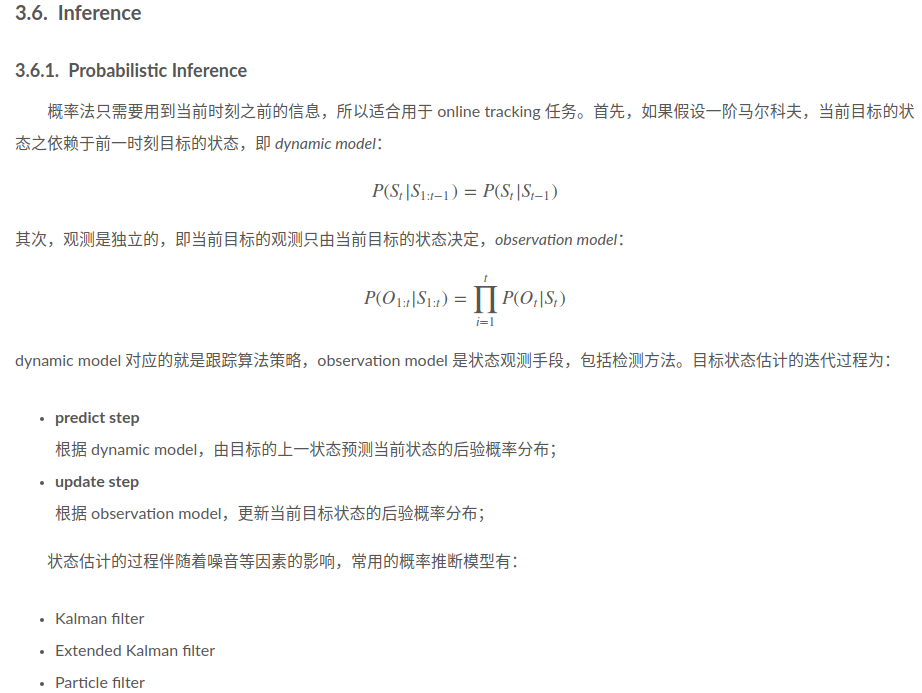
恢复出目标的ID,即inference过程;
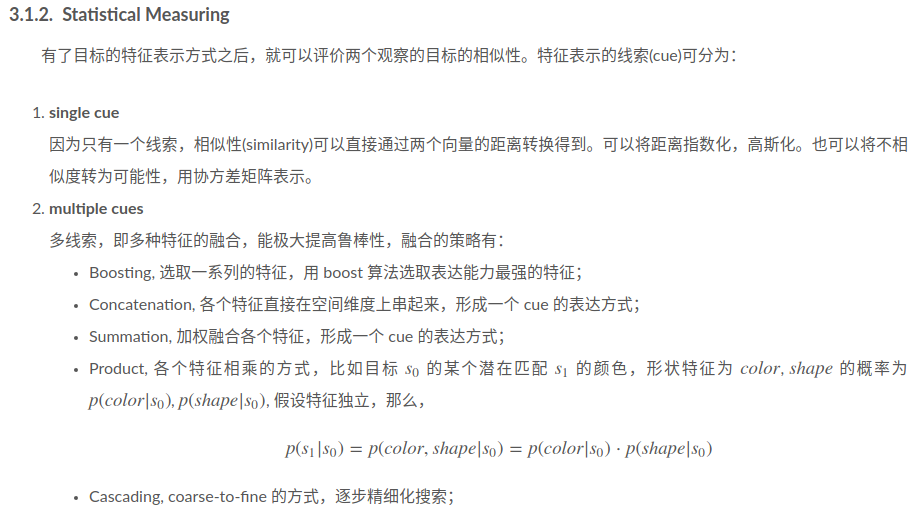
3.1 Visual Representation
3.1.1. Visual Representation
视觉表达即目标的特征表示方式:
- local features
本质上是点特征,点特征由 corner+descriptor(角点+描述子) 组成。KLT(good features to track)在 SOT 中应用广泛,用它可以生成短轨迹,估计相机运动位姿,运动聚类等;Optical Flow也是一种局部特征,在数据关联之前也可用于将检测目标连接到短轨迹中去。 - region features
在一个块区域内提取特征,根据像素间作差的次数,可分为:- zero-order, color histogram & raw pixel template
- first-order, HOG & level-set formulation(?)
- up-to-second-order, Region covariance matrix
- others
其它特征本质上也需要 local 或 region 的方式提取,只是原始信息并不是灰度或彩图。如 depth,probabilistic occupancy map, gait feature.
Local features,比如颜色特征,在计算上比较高效,但是对遮挡,旋转比较敏感;Region features 里,HOG 对光照有一定的鲁棒性,但是对遮挡及形变效果较差;Region covariance matrix 更加鲁棒,但是需要更高的计算量;深度特征也比较有效,但是需要额外的获取深度信息的代价。
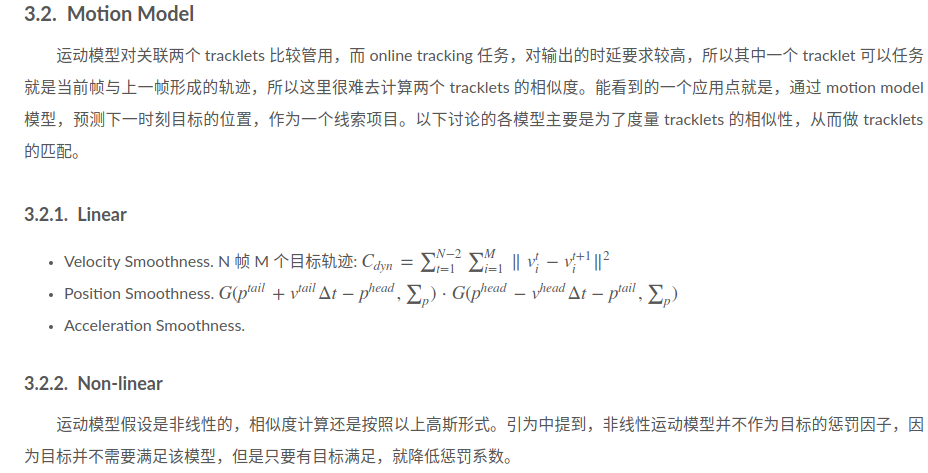
3.3. Interaction Model
3.3.1. Social Force Models
- Individual Force
- fidelity, 目标不会改变它的目的地方向;
- constancy, 目标不会突然改变速度和方向;
- Group Force
- attraction, 目标间应该尽量靠近;
- repulsion, 目标间也得保留适当的距离;
- coherence, 同一个 group 里面的目标速度应该差不多;
3.3.2. Crowd Motion Pattern Models
当一个 group 比较密集的时候,单个目标的运动模型不太显著了,这时候群体的运动模型更加有效,可以用一些方法来构建群体运动模型。
3.4. Exclusion Model
3.4.1. Detection-level
同一帧两个检测量不能指向同一个目标。匹配 tracklets 时,可以将这一项作为惩罚项。不过目前的检测技术都做了 NMS,基本可以消除这种情况。
3.4.2. Trajectory-level
两个轨迹不能非常靠近。对于 online tracking 来说,就是 tracking 结果的两个量不能挨在一起,如果挨在一起,就说明有问题,比如遮挡,或跟丢。
3.5. Occlusion Handling
- Part-to-whole, 将目标分成栅格来处理;
- Hypothesize-and-test,
- Buffer-and-recover, 在遮挡产生前,记录一定量的观测,遮挡后恢复;
- Others
3.6.2. Deterministic Optimization
确定性优化法需要至少一个时间窗口的观测量,所以适合 offline tracking 任务。优化方法有:
- Bipartite graph matching
- Dynamic Programming
- Min-cost max-flow network flow
- Conditional random field
- MWIS(Maximum-weight independent set)
4. 评价方法
评价方法是非常重要的,一方面对算法系统进行调参优化,另一方面比较各个不同算法的优劣。评价方法 (evaluation) 包括评价指标 (metrics) 以及数据集 (datasets),多类别的数据集主要有:
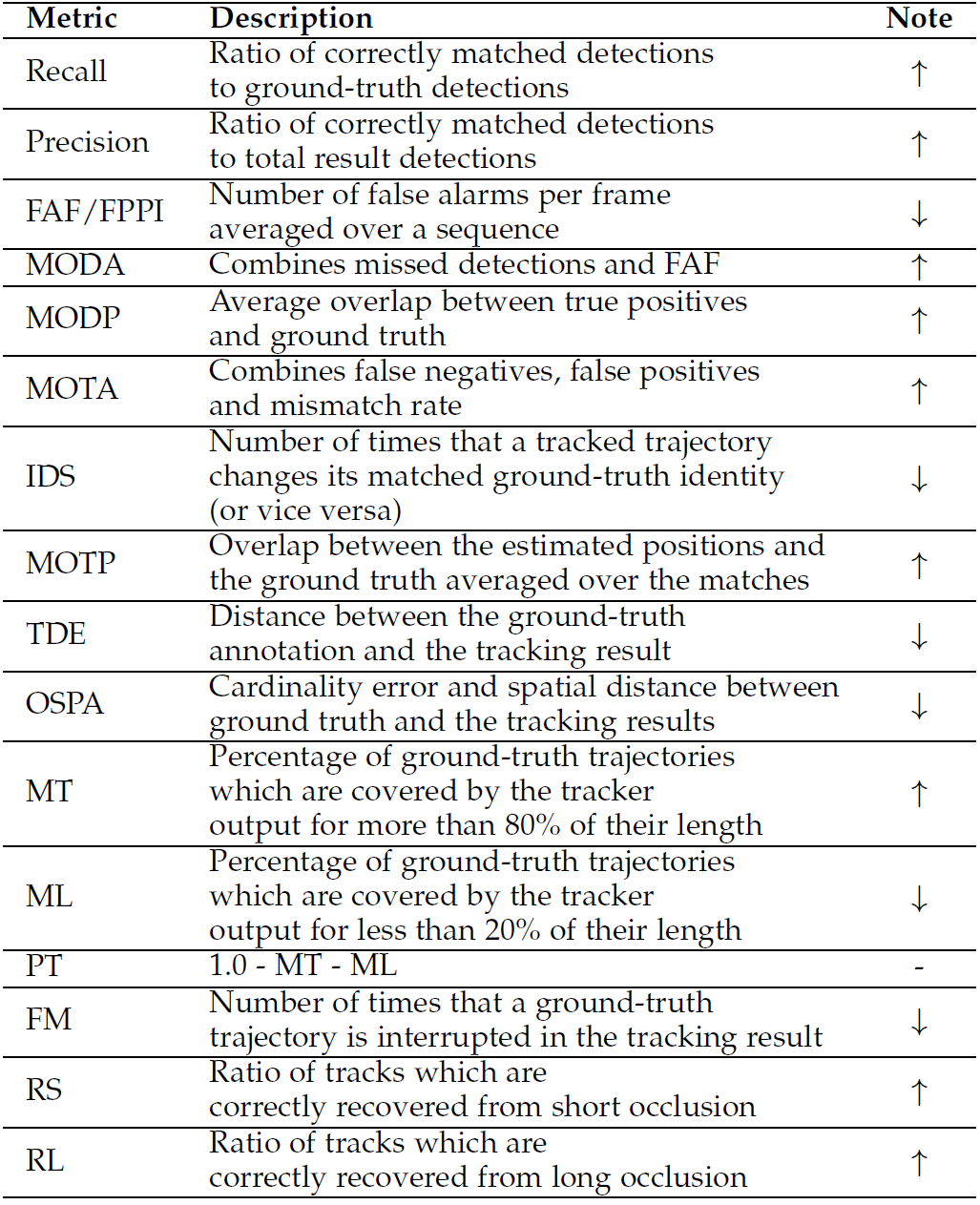
评价指标可分为:
A. 检测指标
◊◊ 准确性(Accuracy)
- Recall & Precision
- False Alarme per Frame(FAF) rate, from paper
- False Positive Per Image(FPPI), from paper
- MODA(Multiple Object Detection Accuracy), 包含了 false positive & miss dets. from paper
◊◊ 精确性(Precision)
- MODP(Multiple Object Detection Precision), 衡量检测框与真值框的位置对齐程度;from paper
B. 跟踪指标
◊◊ 准确性(Accuracy)
◊◊ 精确性(Precision)
- MOTP(Multiple Object Tracking Precision), from paper
- TDE(Tracking Distance Error), from paper
- OSPA(optimal subpattern assignment), from paper
◊◊ 完整性(Completeness)
- MT, the numbers of Mostly Tracked, from paper
- PT, the numbers of Partly Tracked
- ML, the numbers of Mostly Lost
- FM, the numbers of Fragmentation
◊◊ 鲁棒性(Robustness)
- RS(Recover from Short-term occlusion), from paper
- RL(Recover from Long-term occlusion)
5. 总结
5.1. 还存在的问题
MOT 算法模块较多,参数也较复杂,但是最依赖于检测模块的性能,所以算法间比较性能时,需要注意按模块进行变量控制。
5.2. 未来研究方向
- MOT with video adaptation,检测模块式预先训练的,需要在线更新学习;
- MOT under multiple camera: ∘∘ multiple views,不同视野相同场景信息的记录, ∘∘ non-overlapping multi-camera,不同视野不同场景的 reidentification;
- Multiple 3D object tracking,能更准确预测位置,大小,更有效处理遮挡;
- MOT with scene understanding,拥挤场景,用场景理解来有效跟踪;
- MOT with deep learning
- MOT with other cv tasks,和其他任务融合,比如目标分割等;
不要怕,不要悔
https://leijiezhang001.github.io/%E5%8D%A1%E5%B0%94%E6%9B%BC%E6%BB%A4%E6%B3%A2%E8%AF%A6%E8%A7%A3/
https://leijiezhang001.github.io/%E5%8D%A1%E5%B0%94%E6%9B%BC%E6%BB%A4%E6%B3%A2%E5%99%A8%E5%9C%A8%E4%B8%89%E7%BB%B4%E7%9B%AE%E6%A0%87%E7%8A%B6%E6%80%81%E4%BC%B0%E8%AE%A1%E4%B8%AD%E7%9A%84%E5%BA%94%E7%94%A8/