官方教程: wiki.ros.org/cn/ROS/tutorials
程序包打创建于编译
创建程序包
在工作空间的src底下,输入如下命令:
$ catkin_create_pkg 要创建的包名 依赖包名1 依赖包名2
例如:
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp

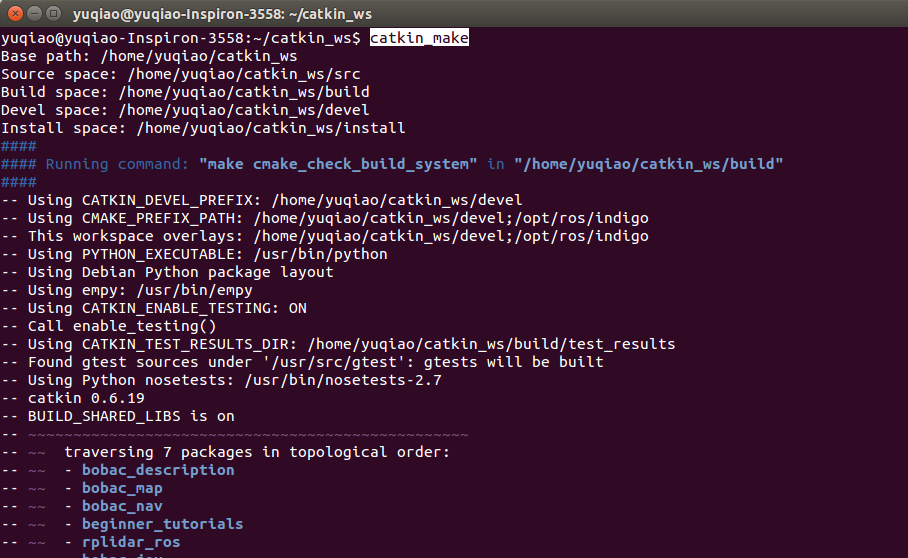
编译程序包
在工作空间里,输入如下命令:
$ catkin_make
运行ros程序
$ roscore
ros 节点
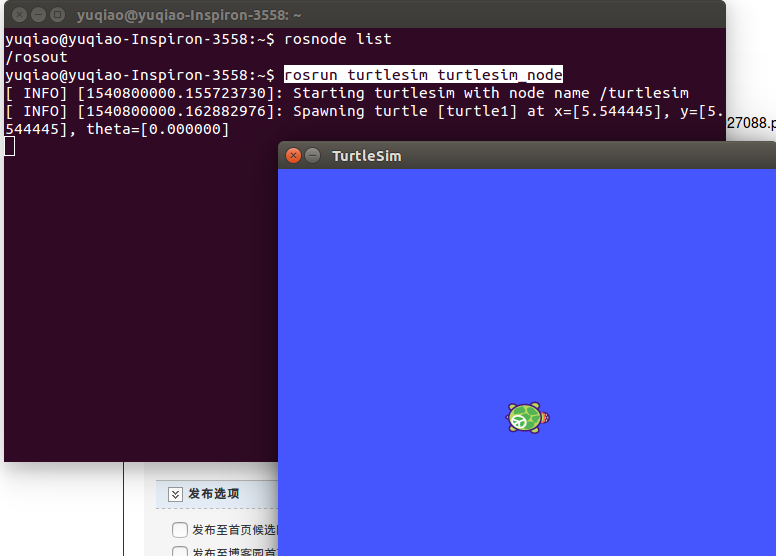
roscore: 运行任意ros程序前必须先运行该命令
rosnode list: 查看现在所有运行的节点,其中rosout 是用于收集和记录节点调试输出信息的,因此始终在运行
rosrun [package_name] [node_name] : 运行某包中的某节点,Ctrl+C终止该节点运行
ros topic
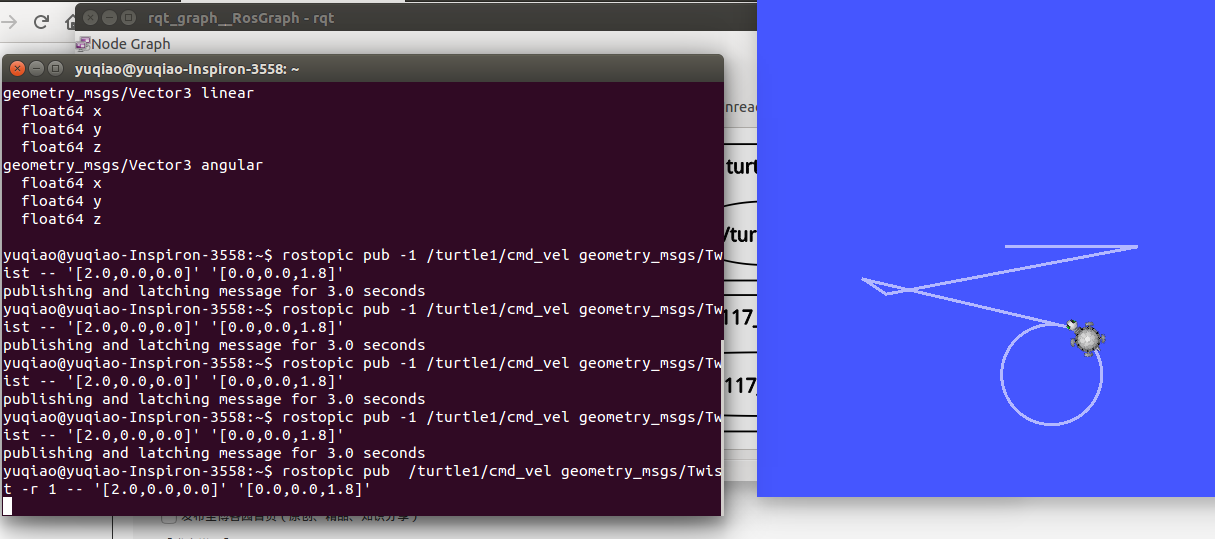
rostopic pub topic
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]'
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]'