自己保存的源码阅读笔记哈
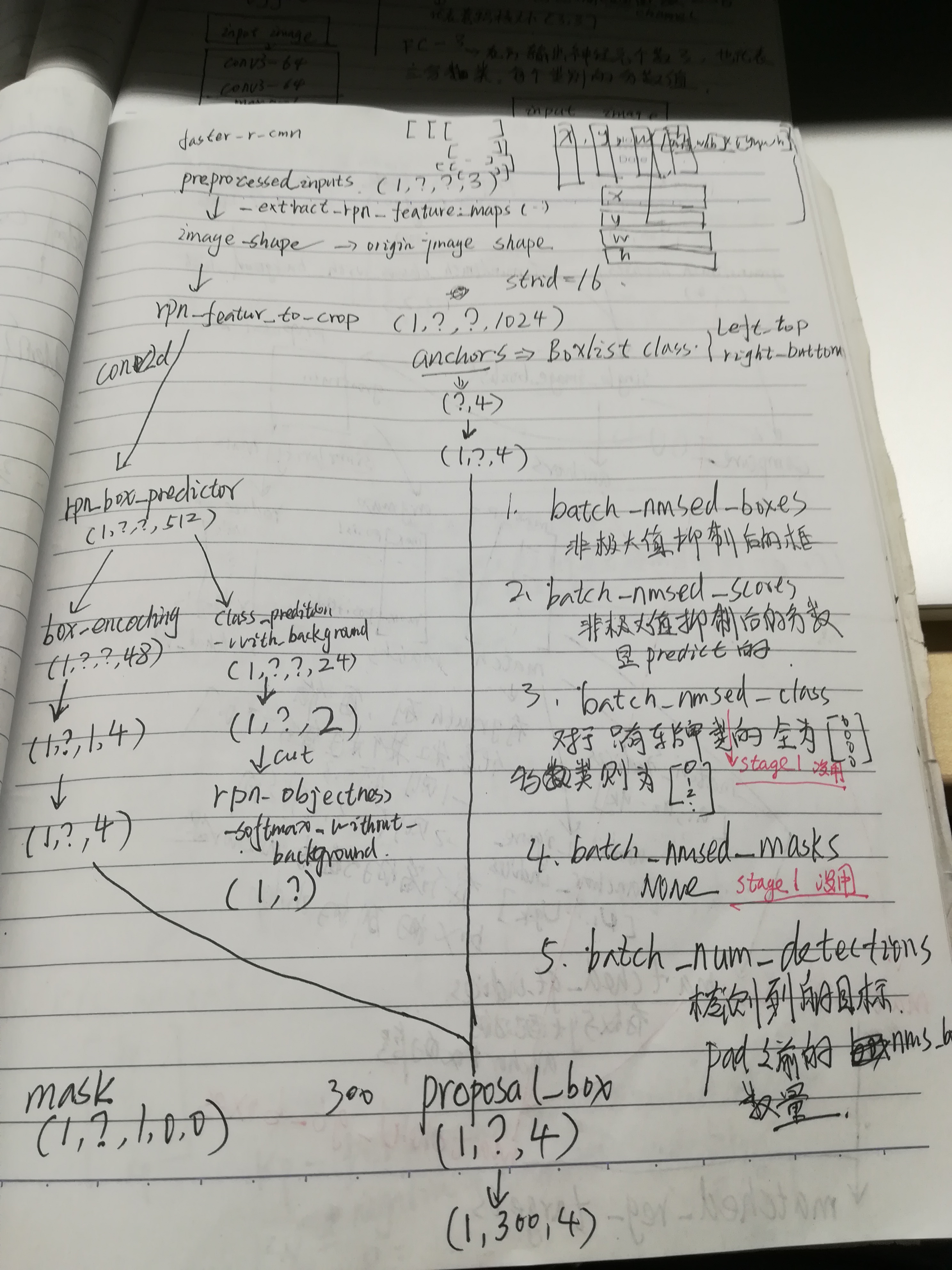
faster rcnn 的主要识别过程(粗略) (开始填坑了):
一张3通道,1600*1600图像输入中,经过特征提取网络,得到100*100*512的feature map (设定stride = 16,这是坐标计算要用的),基于这个,生成100 * 100 * scale * aspdio 的anchor box,然后,
这个feature map 通过使用两个卷积网络分别回归目标非目标和bbox_dealta,两个,分别是rpn_objectness_predictions_with_background:(score1,socre2),rpn_box_encodings:(dx,dy,log(dh),log(dw))六个,size和anchor box 一一对应。 至此,first stage rpn net work 基本Ok。
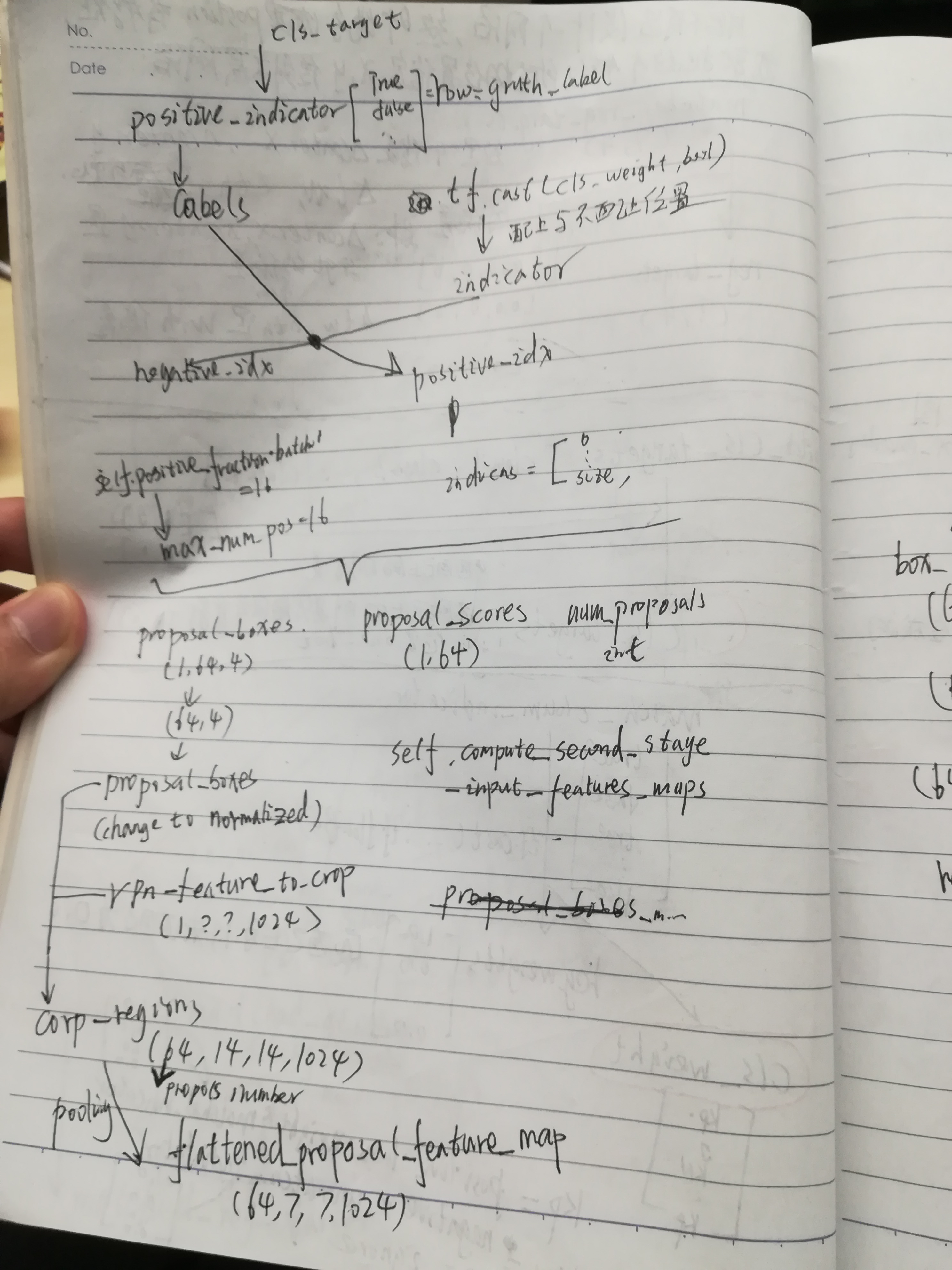
然后,进入second stage ,将(dx,dy,log(dh),log(dw)) 和anchor box 结合,得到的proposals 进行非极大值抑制(tf.image.non_max_suppression),并获得N个proposals(N可以设定),然后,使用tf.image.crop_and_resize,将proposals对应的100*100*512的feature map (resnet101,中前block3作为first stage 的feature map,block4作为second stage
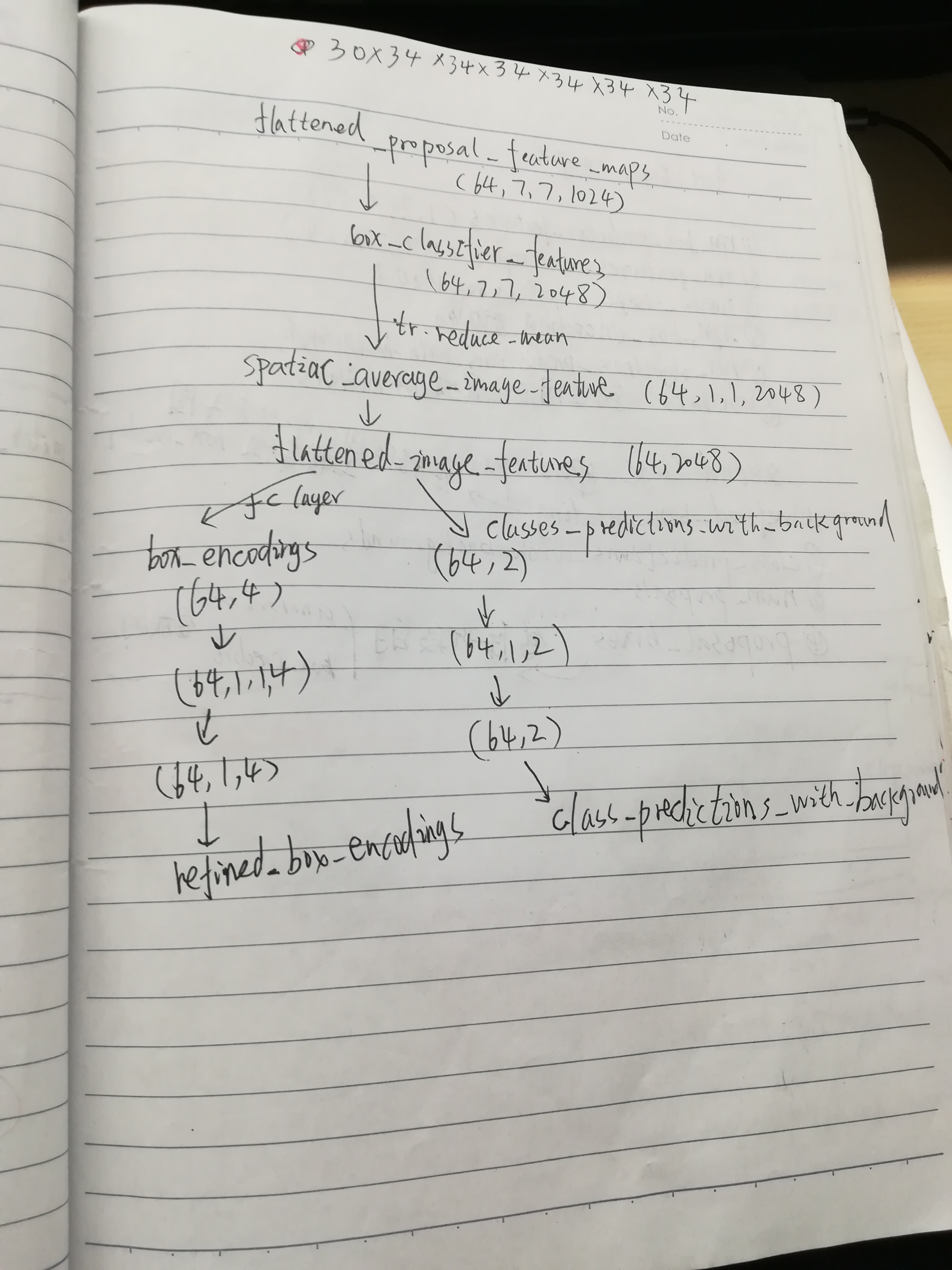
的feature map ,因为坐标是normolize归一化的,所以可以在不同size的feature map 上使用)上的对应目标crop and resize 出来进入bbox 的进一步refine和目标的类别分类,firs stage 中只有识别目标非目标,但是目标是什么类别(是人,还是自行车等等)还是在second stage 这里实现的 。至此,inference过程结束,在training 阶段,还有正负样本输入(iou < 0.3,iou >0.7,和between)和loss计算的细节。
在loss 计算阶段:
first stage loss 包含两部分localization_losses、objectness_losses,这时候,就需要计算anchor box 和ground truth bbox 的iou。以iou > 0.7的为正样本,小于0.3的为负样本。得到objectness_losses,并将iou > 0.7的正样本作为match 的,和ground truth bbox 进行做差,计算,rpn_box_encodings:(dx,dy,log(dh),log(dw))对应的ground truth (batch_reg_targets 框回归的目标)
计算loss,最后面得到:
loss_dict = {
'first_stage_localization_loss':
self._first_stage_loc_loss_weight * localization_loss,
'first_stage_objectness_loss':
self._first_stage_obj_loss_weight * objectness_loss,
}
second stage loss 计算和first stage 是一样的,不一样的就是,其分类变为多分类。同样也是设定iou 阈值
loss_dict = {
'second_stage_localization_loss':
(self._second_stage_loc_loss_weight * second_stage_loc_loss),
'second_stage_classification_loss':
(self._second_stage_cls_loss_weight * second_stage_cls_loss),
}
详细见 tensorflow models object detection 源代码:
https://github.com/tensorflow/models/tree/master/research/object_detection
总共对faster rcnn做了三次笔记,第一次