为什么引入齐次坐标?在实际中,我们的向量(流形)是不变的,但是可以由多个坐标,当同一个流形在不同坐标系中变换时,通常是先旋转后平移,比如,三维坐标的变换:
从有三个坐标,a,b,c,我们知道坐标a变换到坐标b的变换方程是:b = R1 * a + t1,从坐标b变换到c的变换方程是: c = R2 * b + t2.
这时候,坐标a变换到坐标c的方程是:
c = R2 * b + t2 = R2 * (R1 * a + t1) + t2 是不是很丑?
而且,我们“通常”的解决方式是啥? 是矩阵运算,因此,齐次坐标“ 应运而生”:
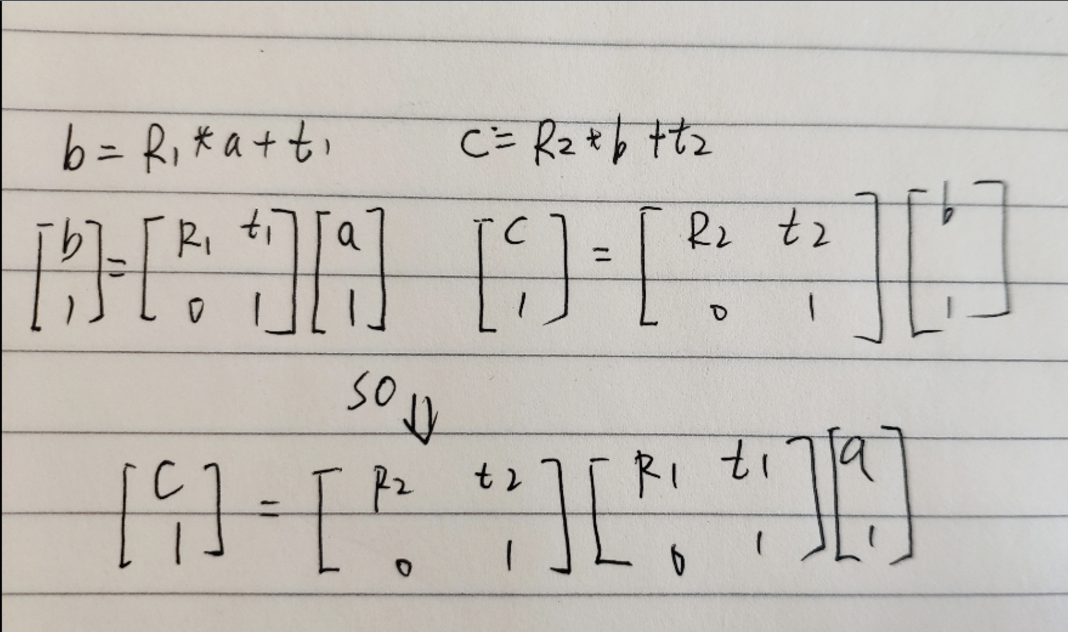
这一样,C = T2 * T1 * a^ 了,是不是很简洁好看,缺点是,维度要增加一维