作者:Tom HardyDate:2020-04-04
原文链接:https://arxiv.org/abs/2003.13328v1
代码链接:https://github.com/Andrew-Qibin/SPNet
主要思想和Contributions
Spatial pooling在捕获像素级预测任务(如场景解析)的long-range contextual信息方面已被证明是非常有效的。本文在传统的N×N型Spatial pooling的基础上,提出了一种考虑狭长核(1×N或N×1)的strip pooling策略,对Spatial pooling的形成进行了重新思考。基于strip pooling,进一步研究了Spatial pooling体系结构设计,本文的主要贡献:
1)引入了一个新的strip pooling模块,使backbone网络能够有效地模拟long-range依赖关系;
2)提出了一种以多种Spatial pooling为核心的新型模块MPM,并构建了SPNet;
3)系统地比较了所提出的strip pooling和传统Spatial pooling技术的性能;
这两种新的基于pooling的模块都是轻量级的,可以作为现有场景解析网络中的一个有效的即插即用模块。在ADE20K和CityScapes上进行的大量实验表明,本文的方法达到了SOTA。
网络结构
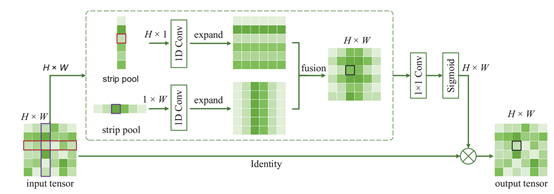
1、Strip pooling(SPM)
1. 如下图所示,使用Hx1和1xW尺寸的条状池化核进行操作,对池化核内的元素值求平均,并以该值作为池化输出值。
2. Hx1和1xW池化核处理后,使用1D Conv对两个输出feature map分别沿着左右和上下进行扩容,如下图所示,扩容后两个feature map尺寸相同,进行fusion(element-wise上的add)。
3. 采用element-wise multiplication的方式对原始数据和sigmoid处理后的结果进行处理,至此,strip pooling完成,输出结果。
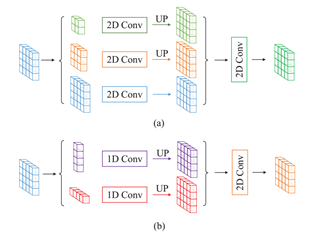
2、MPM(Mixed Pooling Module)
这是本文独立于SPM之外的另外一个模块,具体来说,在每个子模块之前,首先是1×1卷积层用于channel缩减,如下图所示,两个子模块的输出串联在一起,然后送入另一个1×1卷积层进行channel扩展。
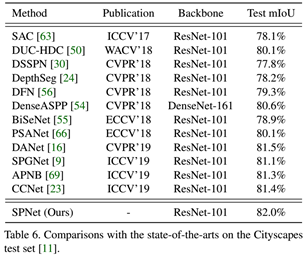
3、SPNet
论文基于SPM和MPM模块搭建了一个网络:SPNet,以残差网络作为backbone,详细结构请参考原文。
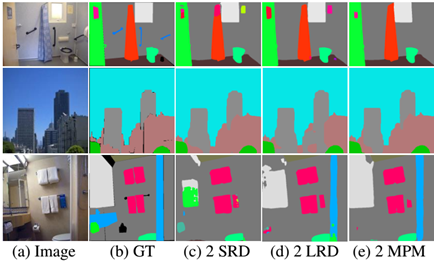
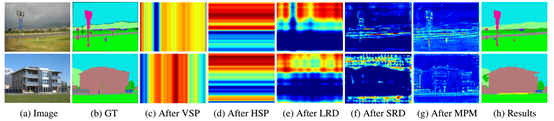
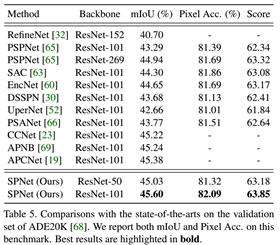
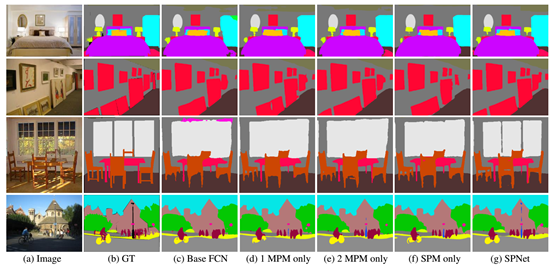
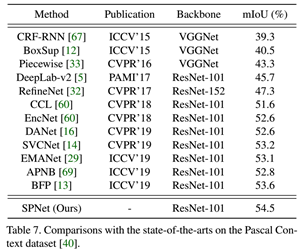
实验结果
论文在ADE20K、Cityscapes和Pascal Context数据集上进行了实验。