【微语】世上有很多不可能,不过不要在你未尽全力之前下结论
特征检测:找到图像特征的技术
特征描述:描述图像特征
Harris角点检测(Corner Detection)
参考:
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_features_harris/py_features_harris.html#harris-corners
角点的特征是 无论框框往哪边移动 框框内像素值都会变化很大。
学习函数:cv2.cornerHarris() , cv2.cornerSubPix()
cornerHarris(img, blockSize, ksize, k[, dst[, borderType]]) -> dst

注意:ksize-Sobel的孔径参数(aperture parameter),也就是Sobel核的半径,如1、3、5、7
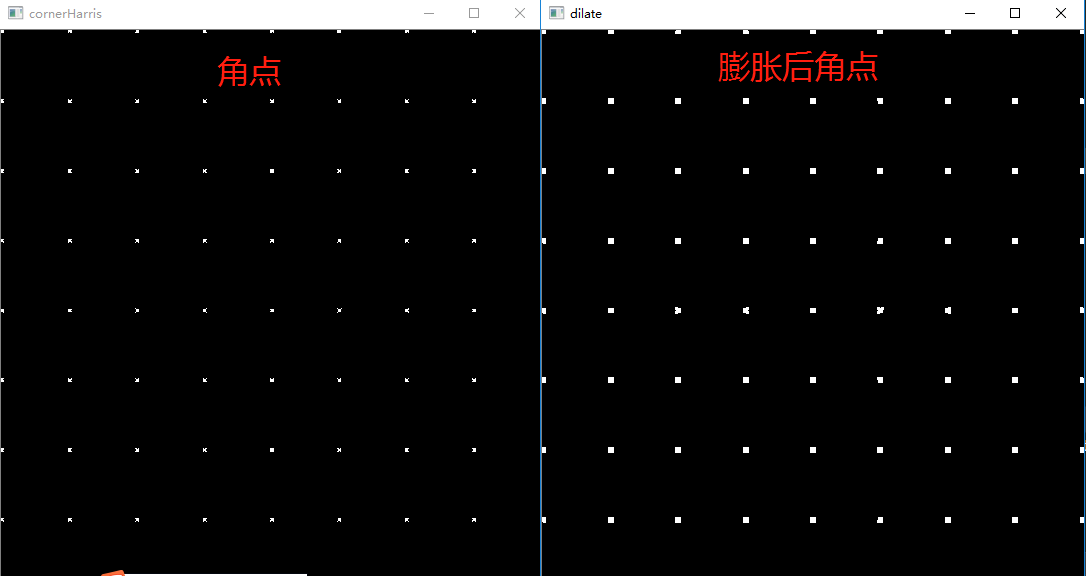
import cv2 import numpy as np img = cv2.imread(r'pictureschessboard.png') gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 检测到角点 gray = np.float32(gray) dst = cv2.cornerHarris(gray,2,3,0.04) cv2.imshow('cornerHarris',dst) dst = cv2.dilate(dst,None) #角点原来是个小叉叉(××) 膨胀角点 cv2.imshow('dilate',dst) cv2.waitKey(0) cv2.destroyAllWindows()
1 import cv2 2 import numpy as np 3 import matplotlib.pyplot as plt 4 5 img = cv2.imread(r'pictureschess.png') 6 gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) 7 8 gray = np.float32(gray) #将gray转化为float32的输入图像 blocksize=2,ksize=3 9 dst = cv2.cornerHarris(gray,2,3,0.04) 10 11 #result is dilated for marking the corners, not important 12 dst = cv2.dilate(dst,None) 13 14 # Threshold for an optimal value, it may vary depending on the image
#将img图像中检测到的角点涂上红色 15 img[dst>0.01*dst.max()]=[0,0,255] 16 17 cv2.imshow('cornerHarris',img) 18 19 if cv2.waitKey(0) & 0xff == 27: 20 cv2.destroyAllWindows()


亚像素级精确度的角点 cv2.cornerSubPix() ---最大精度的角点检测
首先我们要找到 Harris角点,然后将角点的重心传给这个函数进行修正。Harris 角点用红色像素标出,绿色像素是修正后的像素。在使用这个函数是我们要定义一个迭代停止条件。当迭代次数达到或者精度条件满足后迭代就会停止。我们同样需要定义进行角点搜索的邻域大小。
import cv2 import numpy as np filename = 'chessboard.jpg' img = cv2.imread(filename) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到Harris角点 gray = np.float32(gray) dst = cv2.cornerHarris(gray,2,3,0.04) dst = cv2.dilate(dst,None) ret, dst = cv2.threshold(dst,0.01*dst.max(),255,0) dst = np.uint8(dst) # 找到Harris角点重心 ret, labels, stats, centroids = cv2.connectedComponentsWithStats(dst) # 定义迭代停止条件 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.001) corners = cv2.cornerSubPix(gray,np.float32(centroids),(5,5),(-1,-1),criteria) # 绘制角点 res = np.hstack((centroids,corners)) res = np.int0(res) img[res[:,1],res[:,0]]=[0,0,255] img[res[:,3],res[:,2]] = [0,255,0] cv2.imshow('subpixel5.png',img) cv2.waitKey() cv2.destroyAllWindows()

31 Shi-Tomasi 角点检测 & 适合于跟踪的图像特征
参考:
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_shi_tomasi/py_shi_tomasi.html#shi-tomasi
https://www.cnblogs.com/Undo-self-blog/p/8447728.html
目标
本节我们将要学习:
• 函数:cv2.goodFeatureToTrack()
31.1 python-opencv代码
OpenCV 提供了函数:cv2.goodFeaturesToTrack()。这个函数可以帮我们使用 Shi-Tomasi 方法获取图像中 N 个最好的角点(如果你愿意的话也可以通过改变参数来使用 Harris 角点检测算法)。通常情况下,输入的应该是灰度图像。然后确定你想要检测到的角点数目。再设置角点的质量水平,0到 1 之间。它代表了角点的最低质量,低于这个数的所有角点都会被忽略。最后在设置两个角点之间的最短欧式距离。根据这些信息,函数就能在图像上找到角点。所有低于质量水平的角点都会被忽略。然后再把合格角点按角点质量进行降序排列。函数会采用角点质量最高的那个角点(排序后的第一个),然后将它附近(最小距离之内)的角点都删掉。按着这样的方式最后返回 N 个最佳角点。
在下面的例子中,我们试着找出 25 个最佳角点:
import numpy as np import cv2 from matplotlib import pyplot as plt img = cv2.imread('simple.jpg') gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) corners = cv2.goodFeaturesToTrack(gray,25,0.01,10) #返回的结果是[[311,...250]] 两层括号的数组 corners = np.int0(corners) for i in corners: x,y = i.ravel() cv2.circle(img,(x,y),3,255,-1) plt.imshow(img),plt.show()
