opencv 中轮廓特征包括:
如面积,周长,质心,边界框等
*弧长与面积测量
*多边形拟合
*获取轮廓的多边形拟合结果
python-opencv API提供方法:
cv2.moments()用来计算图像中的中心矩(最高到三阶),
cv2.HuMoments()用于由中心矩计算Hu矩,
同时配合函数cv2.contourArea()函数计算轮廓面积
和cv2.arcLength()来计算轮廓或曲线长度
*cv.approxPolyDP
-contour
-epsilon 越小越折 线越逼近真实形状
-close 是否为闭合区域
函数cv2.boundingRect返回四个参数(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高。 函数cv2.rectangle是绘制矩形函数
函数cv2.minAreaRect返回的是一个 Box2D 结构,
其中包含 :矩形左上角角点的坐标(x,y),矩形的宽和高(w,h),以及旋转角度。
但是要绘制这个矩形需要矩形的 4 个角点,可以通过函数 cv2.boxPoints() 获得,最后绘制得到旋转边界矩形。
函数cv2.minEnclosingCircle可以帮我们找到一个对象的外切圆。它是所有能够完全包括对象的圆中面积最小的一个。
函数cv2.fitEllipse返回值其实就是旋转边界矩形的内切圆
*几何矩计算
一幅M×N的数字图像ƒ(i,j),其p+q阶 几何矩mpq 和 中心矩 μpq为:

p+q = 0 为0阶矩
p+q = 1 为1阶矩
p+q = 2 为2阶矩
。。。
其中ƒ(i,j)为图像在坐标点(i,j)处的灰度值。
多边形拟合(应用:选择图片中几何体形状)
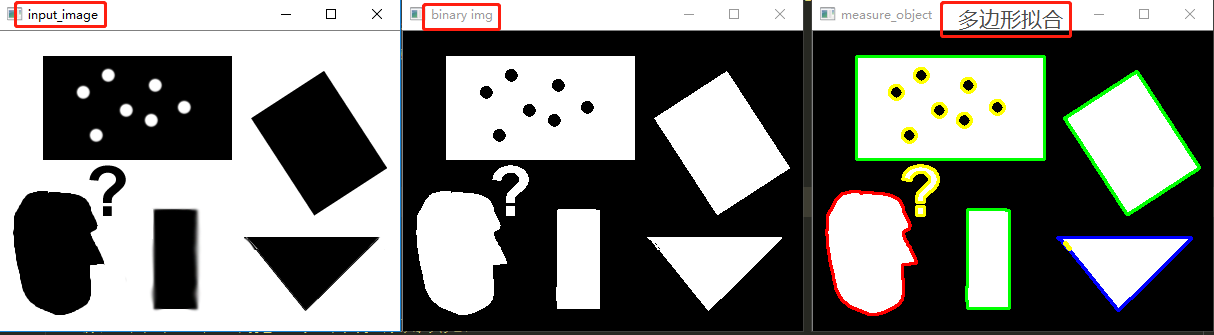
""" approxPolyDP(curve, epsilon, closed[, approxCurve]) -> approxCurve curve-拟合曲线 epsilon-拟合曲线条数(int) closed-拟合曲线是否闭合(True or False) 多边形拟合 """ approxCurve = cv.approxPolyDP(contour,10,True) print(approxCurve.shape) #画轮廓多边形拟合数目>6的图形轮廓为红色 if approxCurve.shape[0] > 6: cv.drawContours(dst,contours,i,(0,0,255),2) ##画轮廓多边形拟合数目=4的图形轮廓为绿色 elif approxCurve.shape[0] == 4: cv.drawContours(dst,contours,i,(0,255,0),2) # 画轮廓多边形拟合数目=3的图形轮廓为蓝 elif approxCurve.shape[0] == 3: cv.drawContours(dst,contours,i,(255,0,0),2) # 画其余数目的轮廓多边形拟合的图形轮廓为黄色 else: cv.drawContours(dst,contours,i,(0,255,255),2)
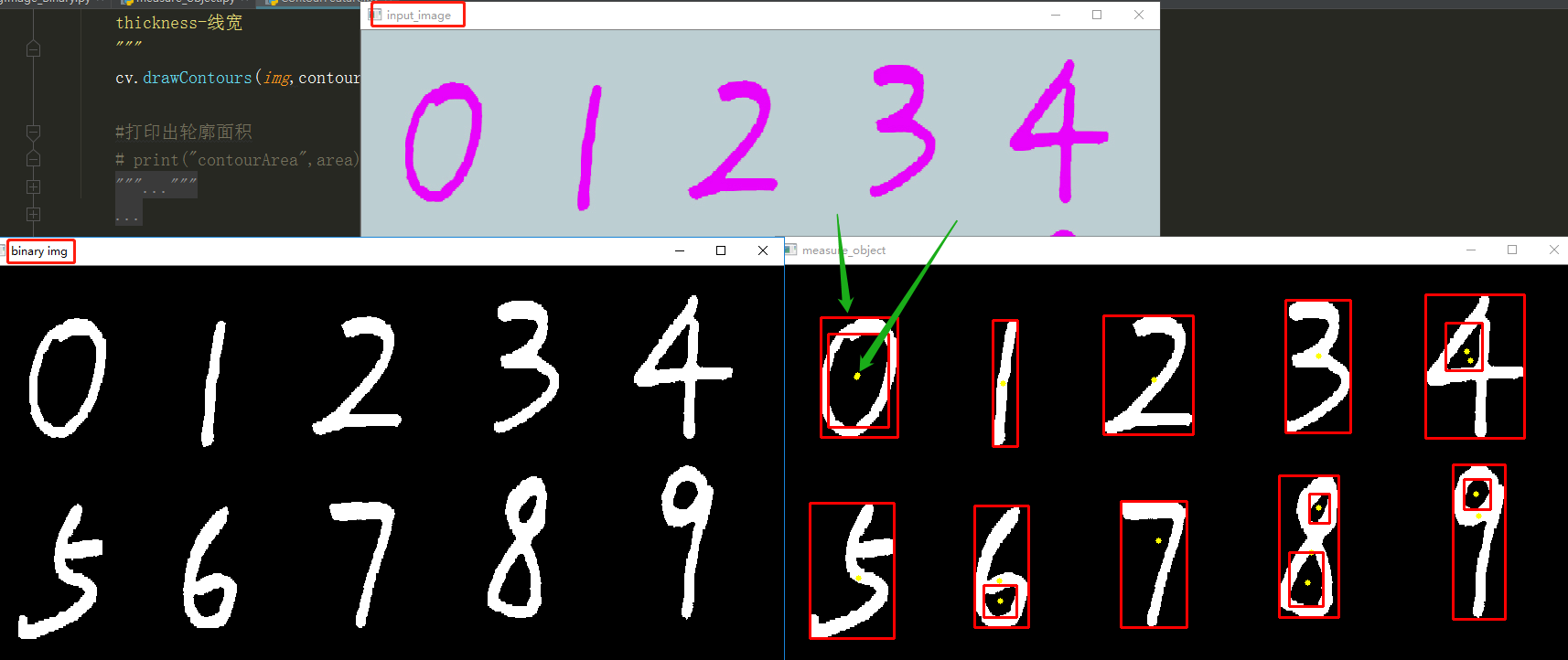
求图形几何矩中心 并求最小外接矩形
源码:
1 def measure_object(img): 2 #img转为灰度图gary 3 gray = cv.cvtColor(img, cv.COLOR_RGB2GRAY) 4 #灰度图gary转为二值图(黑白图)--->输出ret 阈值、binary 二值图 5 ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV|cv.THRESH_OTSU) 6 print("threshold value:",ret) 7 cv.imshow("binary img", binary) 8 # 找二值图binary的轮廓,cv.RETR_EXTERNAL(只检索外部轮廓)、cv.RETR_TREE(检索全部轮廓) 9 outImg, contours, hireachy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) 10 dst = cv.cvtColor(binary,cv.COLOR_GRAY2BGR) 11 #遍历全部轮廓 12 for i, contour in enumerate(contours): 13 # 轮廓面积 14 area = cv.contourArea(contour) 15 # 轮廓外接矩形面积 16 x, y, w, h = cv.boundingRect(contour) 17 # 几何矩 18 mm = cv.moments(contour) 19 # print(type(mm)) #mm是字典类型 20 #获得中心矩 21 if mm['m00']: 22 cx = mm['m10'] / mm['m00'] 23 cy = mm['m01'] / mm['m00'] 24 else: 25 continue 26 27 """ 28 circle(img, center, radius, color[, thickness[, lineType[, shift]]]) -> img 29 #在原图img上绘制圆(圆心np.int(cx), np.int(cy)) 30 半径 3 ,颜色(0,255,0)绿,线宽2(如果为负数则填充) 31 """ 32 cv.circle(dst,(np.int(cx), np.int(cy)), 3, (0, 255, 255), -1) 33 # center, radius = cv.minEnclosingCircle((np.int(cx), np.int(cy))) 34 # cv.circle(img, center, radius, (0, 255, 255), 2) 35 36 """ 37 rectangle(img, pt1, pt2, color[, thickness[, lineType[, shift]]]) -> img 38 在原图img上绘制外接矩形 ,左上角端点坐标(x, y),宽高(x + w, y + h) 39 颜色(0,0,255),线宽2(如果为负数则填充) 40 """ 41 cv.rectangle(dst, (x, y), (x + w, y + h), (0, 0, 255), 2) 42 43 """ 44 绘制轮廓 45 drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]]]) -> image 46 image-原图上绘制轮廓 47 contours-全部轮廓 48 contourIdx-轮廓系数i 49 color-颜色 50 thickness-线宽 51 """ 52 cv.drawContours(img,contours,i,(0,255,0),2) 53 54 #打印出轮廓面积 55 # print("contourArea",area) 56 """ 57 approxPolyDP(curve, epsilon, closed[, approxCurve]) -> approxCurve 58 curve-拟合曲线 59 epsilon-拟合曲线条数(int) 60 closed-拟合曲线是否闭合(True or False) 61 多边形拟合 62 """ 63 approxCurve = cv.approxPolyDP(contour,10,True) 64 print(approxCurve.shape) 65 #画轮廓多边形拟合数目>6的图形轮廓为红色 66 if approxCurve.shape[0] > 6: 67 cv.drawContours(dst,contours,i,(0,0,255),2) 68 ##画轮廓多边形拟合数目=4的图形轮廓为绿色 69 elif approxCurve.shape[0] == 4: 70 cv.drawContours(dst,contours,i,(0,255,0),2) 71 # 画轮廓多边形拟合数目=3的图形轮廓为蓝 72 elif approxCurve.shape[0] == 3: 73 cv.drawContours(dst,contours,i,(255,0,0),2) 74 # 画其余数目的轮廓多边形拟合的图形轮廓为黄色 75 else: 76 cv.drawContours(dst,contours,i,(0,255,255),2) 77 78 cv.imshow("measure_object", dst) 79 80 src = cv.imread('nums.jpg') 81 # src = cv.imread('shape.png') 82 cv.namedWindow('input_image',cv.WINDOW_AUTOSIZE) 83 cv.imshow('input_image',src) 84 85 measure_object(src) 86 87 cv.waitKey(0) 88 cv.destroyAllWindows()
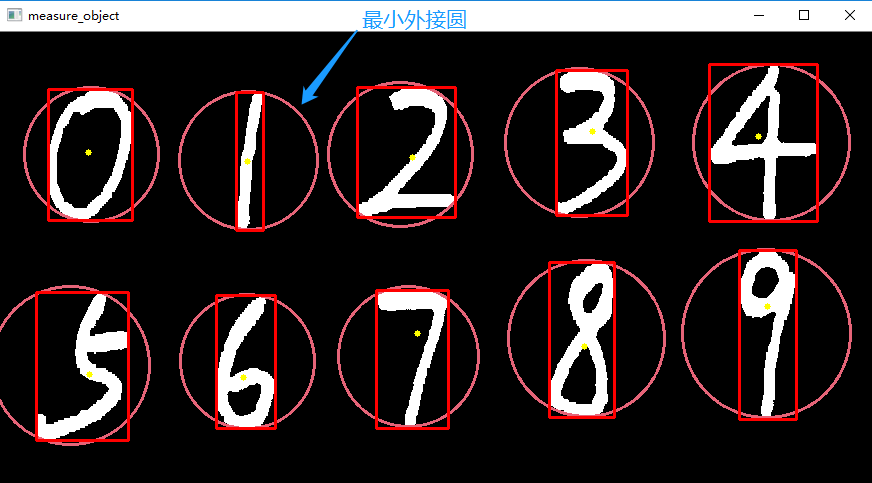
(mcx,mcy),radius = cv.minEnclosingCircle(contour)
cv.circle(dst, (int(mcx),int(mcy)), int(radius), (120, 100, 230), 2)
补充知识点:
outImg, contours, hireachy = cv2.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
函数有3个参数Arguments(变量)
1、source image(源图像)一般是 binary 二值图像
2、contour retrieval mode(轮廓检索模式) 一般选用 cv.RETR_EXTERNAL(只检索外部轮廓) cv.RETR_TREE(检索全部轮廓)
3、contour approximation method(轮廓近似法)一般选用 cv.CHAIN_APPROX_SIMPLE
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)
1、gray-源BGR图像转化的灰度图像
2、像素阈值
3、cv.THRESH_BINARY_INV | cv.THRESH_OTSU -二值图像转化方法
参考文章:
https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_imgproc/py_contours/py_table_of_contents_contours/py_table_of_contents_contours.html#