系统总体设计方案
- 目标识别单元设计
- 软件构成
- 人工辅助模块
- 深度学习网络
- 目标检测方法
- 目标分类识别算法设计和改进
- 中间结果综合处理单元
- 硬件构成
- 软件构成
- 分拣控制单元设计
- 运动学分析
- 协同控制
- 硬件设计选型
项目说明
该系统的使用环境为智能化的生活垃圾分拣车间,垃圾传送带上进行对目标的识别、抓捕和分拣操作;同时根据环保行业的相关政策和利润分析,玻璃瓶和塑料瓶一方面不利于自然分解,且难以利用磁吸、震动筛选等方法拣出,另一方面对瓶子破裂后对后续分拣回收造成不利影响,因此以玻璃瓶和塑料瓶作为本文的抓捕目标进行系统设计。
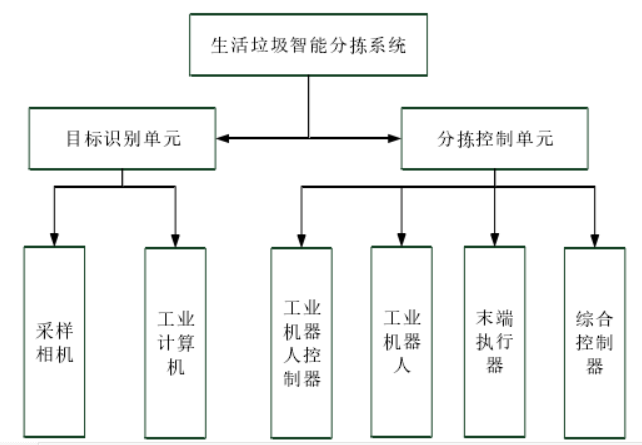
结合基于机器视觉的智能生活垃圾分拣系统的整体解决方案,通过总体目标需求分析,可描绘出本系统的使用规划,参考工业4.0智慧工厂、云计算、智能车间等信息化厂房布局和规划,可将本系统总体分为云计算管理层、工厂级中央监控层、车间及设备综合管理层、系统及智能控制器层、设备级智能控制器层和车间执行设备层等六层结构。
在生活垃圾分拣子系统部分,分别由自动分拣控制平台(网络PC机)、机械臂控制柜、工业机械臂、视觉处理器、光学检测设备、传送带控制器和传送带等设备组成。
本项目主要研究的关键技术
- 基于视觉识别的分类检测技术
- 垃圾物的抓取执行器的机构设计与控制技术
- 垃圾抓取机械臂的在线轨迹规划技术
- 多机械臂协同控制方法
目标识别单元设计
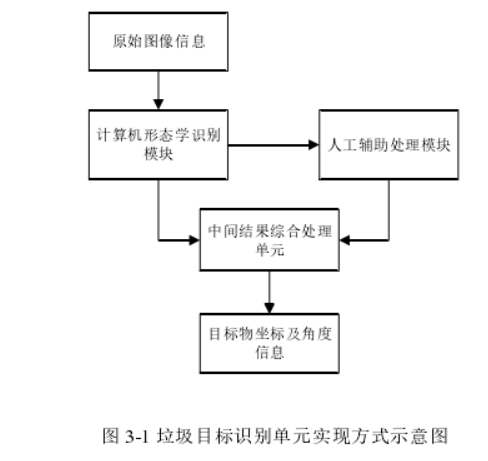
形态学识别模块
基于深度学习的目标检测技术
- 区域卷积神经网络R-CNN
- FastR-CNN
目标分类识别算法设计和改进
-
Faster-RCNN模型
-
RPN网络(采用全卷积网络设计方式,卷积层采用VGG-16模型,并与后续的分类网络共享卷积,减少重复计算)
-
VGG-16网络
采用交替训练的方法来交替优化训练共享特征
-
-
Hyper-Column方案
对原始的VGG-16进行了改进
深度学习网络
- 对输入的图像分层卷积和池化
- 分类器
人工辅助处理模块
中间结果综合处理单元
目标识别单元构成
- 采样相机选型
- 工业计算机选型
分拣控制单元设计
- 分拣机器人运动学分析
- 机械臂正逆云顶学模型分析
- 多机械手控制设计
- 硬件设计选型
- 工业机器人的选型
- 工业机器人控制器选型
- 综合控制器选型
- 末端执行器的设计