一、抄表的原理
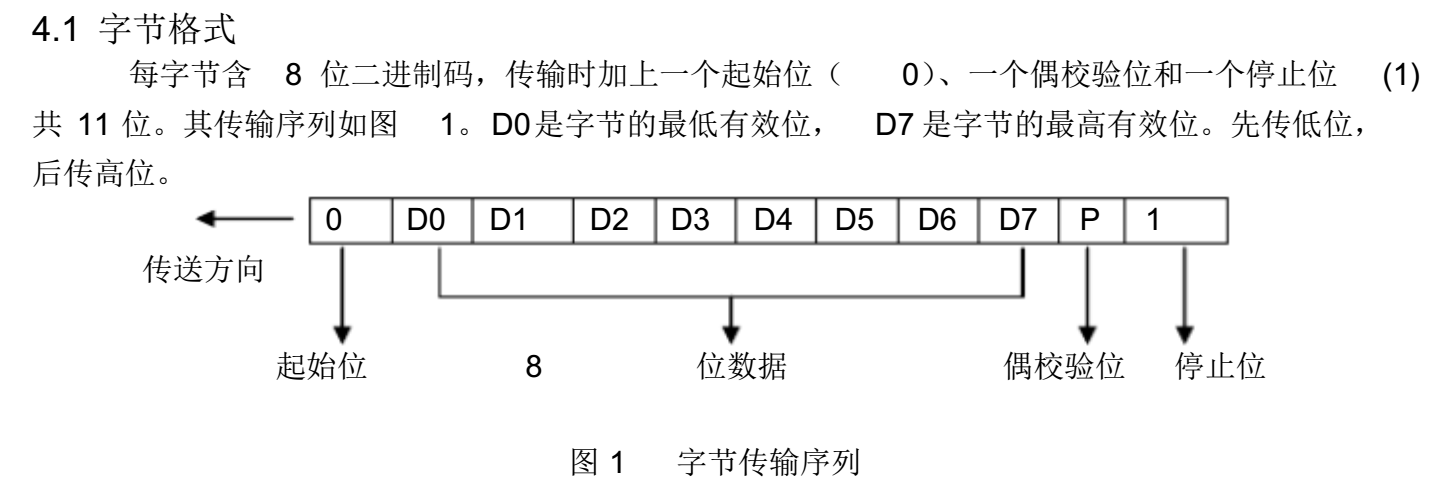
抄表就是读电能表的测量参数,一般有电能,电压,电流,实时功率,功率因数等,用单板抄表其实就是读电能表种相应寄存器中的值。智能电表目前主流协议有DLT645国标各家通用,MODBUS各家有自己协议。这里就拿DLT645为例,MODBUS很简单一条指令可以读连续的地址空间,收发一次抄到所有数据。645就得一条一条读。
DL/T645-1997 通讯规约通信规约
这里主要需要配置串口时按照协议要求配置,我的另一篇随笔种有串口的配置方法http://www.cnblogs.com/VergilYang/p/8902264.html
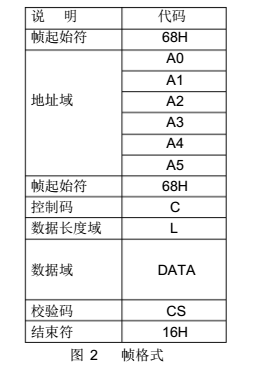
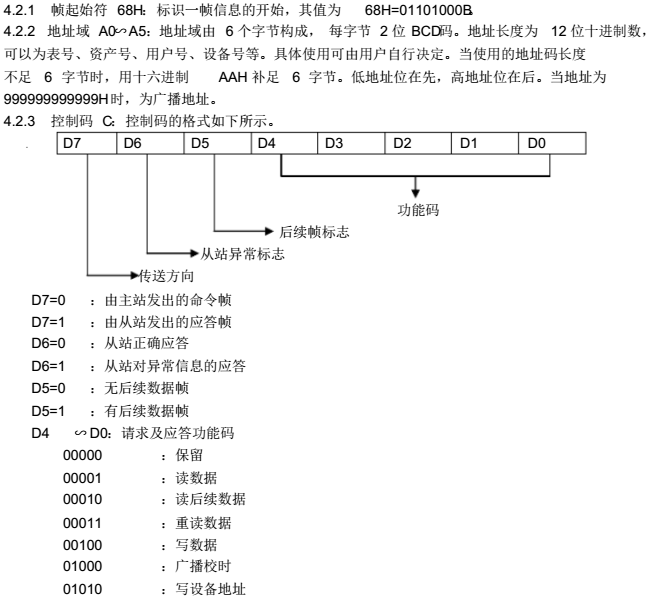
协议中最关键的部分就是帧格式了,别看这么多如果只是抄表的话用到的就只有读数据这一种控制码。
我们试着组织一条完整报文
帧起始符没有问题,地址怎么确定,一般表的铭牌上会写地址,如果串口上只挂了这一个设备,可以广播一般为全9或者全A,这样我们就能得到68 AA AA AA AA AA AA 68
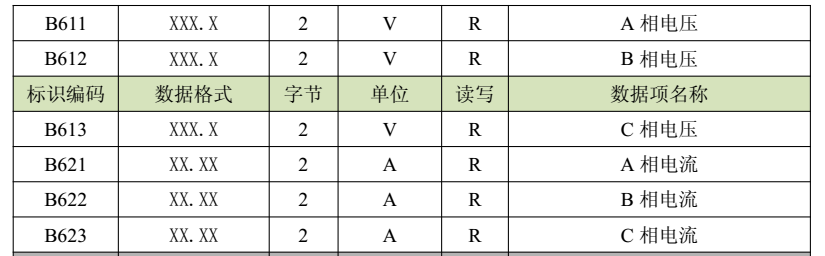
接下来是控制码,我现在想读一个电压,那么控制码就是01,数据得看各家的寄存器地址,查出来为B6 11,但是发送的时候要加33H而且高位在右低位在左,即44 E9,可以得到 68 AA AA AA AA AA AA 68 01 02 44 E9
最后是校验码,ADD8可以写一个专门计算校验的函数,这里算出来是FC,所以完整的报文就是68 AA AA AA AA AA AA 68 01 02 44 E9 FC 16
这时电表回一条68 AA AA AA AA AA AA 68 81 04 44 E9 33 55 06 16 可以看出返回了电压数据是 33 55,前后颠倒再减33H救得到2200,电表这位精度是0.1那么就是220.0V
二、软件的实现方法
定义一个帧的结构体
typedef struct DLT645_CmdFrame
{
u32 BaudRate;
u8 TxBuf[256];
u8 RxBuf[256];
u8 add[6]; //地址域
u8 len; //数据长度
u8 cmd; //控制码
u8 data[2]; //数据域
}DLT645_CmdFrame;
我这里用了两路485分别读一个电能表,这里配合一个定时器,发送一条在500ms内回一条,算一条收发成功,然后发送下一条。
发送抄表指令 -> 等待返回数据 -> 返回数据直接保存在Charger中 -> 读下一项数据
|-> 累积十个5秒报故障(报故障功能没写)
#include "App_Com_DLT645.h"
#include "Drv_UARTx.h"
#define A_Electical_Meter 1
#define B_Electical_Meter 0
DLT645_CmdFrame EMFrame[2];
extern Charger st_Charger[2];
extern Com_Manager Com[7];
/*******************************************************************************
* Function Name : EMFrame_Packager
* Description : 封装645帧
* Last Eidt Time : 2018年4月18日09:49:57
* Author :Vergil Yang
* Notice :
*******************************************************************************/
void EMFrame_Packager(DLT645_CmdFrame *frame,u8 cmd,u8 datalen,u8 data[])//添加帧头长度校验码
{
frame->TxBuf[8] = cmd; //控制码
frame->TxBuf[9] = datalen; //数据域长度
memcpy(&frame->TxBuf[10],data,datalen); //数据域
frame->TxBuf[10+datalen] = CalcSum(frame->TxBuf,10+datalen);//ADD8校验码
frame->TxBuf[11+datalen] = 0x16;//结束码
}
/*******************************************************************************
* Function Name : EMFrame_UnPackager
* Description : 解析645帧
* Last Eidt Time : 2018年4月18日09:49:57
* Author :Vergil Yang
* Notice :
*******************************************************************************/
u8 EMFrame_UnPackager(u8 *buf,u16 cnt)
{
u16 add8;
add8 = CalcSum(buf,cnt-2);
if((buf[0] != 0x68)||(buf[7] != 0x68))
{
return 1;//帧头错误
}
else if(buf[8] != 0x01)
{
return 2;//控制码错误
}
else if((buf[9] + 12) != cnt)
{
return 3;//长度错误
}
else if(buf[cnt-2] != add8)
{
return 4;//ADD8错误
}
else
{
return 0;
}
}
/*******************************************************************************
* Function Name : DataConvert
* Description : 解析645数据转换
* Last Eidt Time : 2018年4月18日09:49:57
* Author :Vergil Yang
* Notice :
*******************************************************************************/
u32 DataConvert(u8 *buf)
{
u8 cnt;
u32 temp;
cnt = buf[9]-2;//数据个数 - 指令码(2字节) = 数据字节个数
temp=0;
while(cnt)
{
temp *=100;
temp=temp+(((buf[11+cnt]-0x33)>>4)*10)|((buf[11+cnt]-0x33)&0x0F);
cnt--;
}
return temp;
}
/*******************************************************************************
* Function Name : EMTask_Deal
* Description : 抄表处理
* Last Eidt Time : 2018年4月18日09:49:57
* Author :Vergil Yang
* Notice :
*******************************************************************************/
void EMTask_Deal()
{
u8 i;
u16 framelen;
u32 temp;
#if B_Electical_Meter
for(i = 0;i < 2;i++)
#else
for(i = 0;i < 1;i++)
#endif
{
if(st_Charger[i].EM_Data.status == Need_Send)
{//发送
switch(st_Charger[i].EM_Data.step)
{
case 0:EMFrame_Packager(&EMFrame[i],0x01,2,"x44xE9");break;
case 1:EMFrame_Packager(&EMFrame[i],0x01,2,"x45xE9");break;
case 2:EMFrame_Packager(&EMFrame[i],0x01,2,"x46xE9");break;
case 3:EMFrame_Packager(&EMFrame[i],0x01,2,"x54xE9");break;
case 4:EMFrame_Packager(&EMFrame[i],0x01,2,"x55xE9");break;
case 5:EMFrame_Packager(&EMFrame[i],0x01,2,"x56xE9");break;
case 6:EMFrame_Packager(&EMFrame[i],0x01,2,"x63xE9");break;
case 7:EMFrame_Packager(&EMFrame[i],0x01,2,"x64xE9");break;
case 8:EMFrame_Packager(&EMFrame[i],0x01,2,"x65xE9");break;
case 9:EMFrame_Packager(&EMFrame[i],0x01,2,"x66xE9");break;
case 10:EMFrame_Packager(&EMFrame[i],0x01,2,"x43xC3");break;
default:break;
}//装载完成
if(i==0)Drv_Uart_Async_Send(&Com[4],EMFrame[i].TxBuf,14);
else{Drv_Uart_Async_Send(&Com[5],EMFrame[i].TxBuf,14);}
Tick_SetTimerDisable(EM_AskOverTime_L+i);
Tick_SetTimerEnable(EM_AskOverTime_L+i,500,TIMER_ms);//开始计时
st_Charger[i].EM_Data.status = Recving;
}
else
{//接收
if(i==0)
{
framelen = Drv_Uart_Async_Recv(&Com[4],EMFrame[i].RxBuf);
}
else if(i==1)
{
framelen = Drv_Uart_Async_Recv(&Com[5],EMFrame[i].RxBuf);
}
if(Tick_GetRemainTime(EM_AskOverTime_L+i)>0)
{
if(framelen != 0)
{ //收到数据
if(EMFrame_UnPackager(EMFrame[i].RxBuf,framelen)==0)
{
temp = DataConvert(EMFrame[i].RxBuf);//接收解析
switch(st_Charger[i].EM_Data.step)
{
case 0:st_Charger[i].EM_Data.PhaseA_Voltage = temp;break;
case 1:st_Charger[i].EM_Data.PhaseB_Voltage = temp;break;
case 2:st_Charger[i].EM_Data.PhaseC_Voltage = temp;break;
case 3:st_Charger[i].EM_Data.PhaseA_Current = temp;break;
case 4:st_Charger[i].EM_Data.PhaseB_Current = temp;break;
case 5:st_Charger[i].EM_Data.PhaseC_Current = temp;break;
case 6:st_Charger[i].EM_Data.Total_Power = temp;break;
case 7:st_Charger[i].EM_Data.PhaseA_Power = temp;break;
case 8:st_Charger[i].EM_Data.PhaseB_Power = temp;break;
case 9:st_Charger[i].EM_Data.PhaseC_Power = temp;break;
case 10:st_Charger[i].EM_Data.Total_Energy = temp;break;
default:st_Charger[i].EM_Data.step = 0;break;
}
st_Charger[i].EM_Data.cnt_overtime = 0;
st_Charger[i].EM_Data.step++;//接收成功发下一条
if(st_Charger[i].EM_Data.step>10)st_Charger[i].EM_Data.step = 0;
st_Charger[i].EM_Data.status = Need_Send;
}
else
{
st_Charger[i].EM_Data.status = Need_Send;//帧错误
}
}//没收到数据等待什么都不做
}
else
{
st_Charger[i].EM_Data.status = Need_Send;//超时
st_Charger[i].EM_Data.cnt_overtime++;
if(st_Charger[i].EM_Data.cnt_overtime>10)
{
//报故障
}
}
}
}
}
/*******************************************************************************
* Function Name : InitEM
* Description : 初始化电表通讯
* Last Eidt Time : 2018年4月18日09:49:57
* Author :Vergil Yang
* Notice :
*******************************************************************************/
void InitEM()
{
//A表---EMFrame[0]
#if A_Electical_Meter
EMFrame[0].BaudRate = 9600;
memcpy(EMFrame[0].TxBuf,"x68x99x99x99x99x99x99x68",8);
InitUart4(EMFrame[0].BaudRate);
//SyncBaudrate(0,9600);///波特率同步成功即初始化成功
#endif
//B表---EMFrame[1]
#if B_Electical_Meter
EMFrame[1].BaudRate = 9600;
memcpy(EMFrame[1].TxBuf,"x68x99x99x99x99x99x99x68",8);
InitUART5(EMFrame[1].BaudRate);
QueueInit(&EMQueue[1]);
SyncBaudrate(0,9600);///波特率同步成功即初始化成功
#endif
}