算法与数据结构---8.3、过河卒-递推解法
一、总结
一句话总结:
过河卒的递推解法我们选用动态规划,动态规划就是保存中间状态的递推解法,这题递推表达式非常明确,所以动态规划做起来也非常容易
1 /* 2 3 状态: 4 如果设f[i][j]表示走到(i,j)点的路径总数 5 6 递推表达式(状态转移方程): 7 f[i][j]=f[i-1][j]+f[i][j-1] 8 9 初始状态: 10 f[0][0]=1 11 假设马控制的点的坐标为(mx,my),那么f[mx][my]始终为0 12 13 */ 14 #include <iostream> 15 #include <cstring> 16 using namespace std; 17 int hx[9]={0,-2,-1,1,2,2,1,-1,-2}; 18 int hy[9]={0,1,2,2,1,-1,-2,-2,-1}; 19 long long f[25][25]; 20 21 int main(){ 22 int bx,by,mx,my; 23 cin>>bx>>by>>mx>>my; 24 memset(f,-1,sizeof(f)); 25 f[0][0]=1; 26 27 //将马控制的点加入到f数组 28 for(int i=0;i<=8;i++){ 29 int now_x=mx+hx[i]; 30 int now_y=my+hy[i]; 31 if(now_x>=0&&now_y>=0){ 32 f[now_x][now_y]=0; 33 } 34 } 35 36 //做动态规划 37 for(int i=0;i<=bx;i++){ 38 for(int j=0;j<=by;j++){ 39 //if(i||j) 40 //动态规划填表的时候,对于能够填表的点才填表 41 //不能填表的点比如初始状态就不能动 42 if(f[i][j]==-1) 43 { 44 //f[i][j]=f[i-1][j]+f[i][j-1] 45 if(i-1>=0&&j-1>=0) f[i][j]=f[i-1][j]+f[i][j-1]; 46 else if(i-1>=0) f[i][j]=f[i-1][j]; 47 else if(j-1>=0) f[i][j]=f[i][j-1]; 48 else f[i][j]=0; 49 } 50 } 51 } 52 53 cout<<f[bx][by]<<endl; 54 return 0; 55 }
1、本题(过河卒)动态规划解法填表的时候的注意点是什么?
动态规划填表的时候,对于能够填表的点才填表,不能填表的点比如初始状态就不能动
//做动态规划 for(int i=0;i<=bx;i++){ for(int j=0;j<=by;j++){ //if(i||j) //动态规划填表的时候,对于能够填表的点才填表 //不能填表的点比如初始状态就不能动 if(f[i][j]==-1) { //f[i][j]=f[i-1][j]+f[i][j-1] if(i-1>=0&&j-1>=0) f[i][j]=f[i-1][j]+f[i][j-1]; else if(i-1>=0) f[i][j]=f[i-1][j]; else if(j-1>=0) f[i][j]=f[i][j-1]; else f[i][j]=0; } } }
二、过河卒
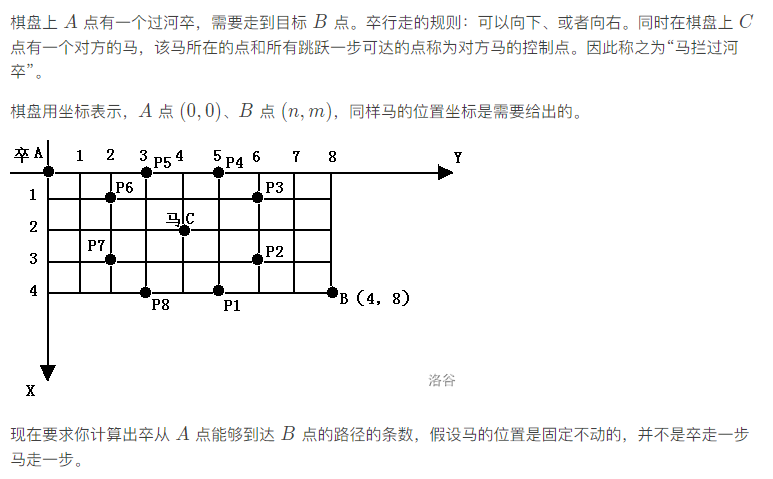
1、题目描述

/*
题目位置:
P1002 过河卒 - 洛谷
https://www.luogu.com.cn/problem/P1002
*/
/*
样例输入:6 6 3 3
样例输出:6
b点是(6,6),马的坐标是(3,3)
A是A点 , B是B点, M是马的位置, X是被马拦着不能走的点
A 0 0 0 0 0 0
0 0 X 0 X 0 0
0 X 0 0 0 X 0
0 0 0 M 0 0 0
0 X 0 0 0 X 0
0 0 X 0 X 0 0
0 0 0 0 0 0 B
其中每个点的值代表的是当前这个点会有几条路径用过这个点
(路径指的是从A到B的路径)
1 1 1 1 1 1 1
1 2 X 1 X 1 2
1 X 0 1 1 X 2
1 1 1 M 1 1 3
1 X 1 1 0 X 3
1 1 X 1 X 0 3
1 2 2 3 3 3 6
*/
2、搜索解法
博客对应课程的视频位置:8.1、过河卒-搜索解法
https://www.fanrenyi.com/video/27/288
1 /*
2
3 递推表达式:
4 卒子可以向下走和向右走
5 如果设f[i][j]表示走到(i,j)点的路径总数
6 对应的走到f[i][j]只能从上边来或者从左边来
7 f[i][j]=f[i-1][j]+f[i][j-1]
8
9
10 简单的思考:
11 如果没有这个马,搜索应该怎么做
12
13 递归:
14 递归的终止条件:起点
15 递归的递推表达式:f[i][j]=f[i-1][j]+f[i][j-1]
16 递归的返回值:路径条数
17
18 初始值:f[0][0]=1
19
20 如果有马的情况
21 递归的终止条件:起点或者马控制的区域
22
23
24 注意:
25 1、本题的路径条数是超过int的,所以要用long long
26 2、使用递推表达式f[i][j]=f[i-1][j]+f[i][j-1]时,
27 因为有i-1、j-1,所以要考虑i、j是否大于1的情况
28 3、初始化的时候,不能直接初始化i=0和j=0对应的两条线,
29 因为当马的控制点在这两条线上时,控制点后的点是达不到的
30
31
32 思考:
33 1 1 1 1 1 1 1
34 1 2 X 1 X 1 2
35 1 X 0 1 1 X 2
36 1 1 1 M 1 1 3
37 1 X 1 1 0 X 3
38 1 1 X 1 X 0 3
39 1 2 2 3 3 3 6
40 这里初始化的时候能直接初始化i=0和j=0对应的两条线么
41 不能,因为如果这样初始化后,当马的位置如果是(4,0),
42 那么(5,0)的位置本来是去不了的,
43 但是这样初始化却会初始化为1
44
45
46 */
47 #include <iostream>
48 #include <cstring>
49 using namespace std;
50 int hx[9]={0,-2,-1,1,2,2,1,-1,-2};
51 int hy[9]={0,1,2,2,1,-1,-2,-2,-1};
52 long long f[25][25];
53 long long find(int x,int y){
54 //如果缓存里面有,就从缓存里面拿
55 //否则计算结果存入缓存
56 if(f[x][y]!=-1) return f[x][y];
57 else{
58 //f[i][j]=f[i-1][j]+f[i][j-1]
59 if(x-1>=0&&y-1>=0) return f[x][y]=find(x-1,y)+find(x,y-1);
60 else if(x-1>=0) return f[x][y]=find(x-1,y);
61 else if(y-1>=0) return f[x][y]=find(x,y-1);
62 else return f[x][y]=0;
63 }
64 }
65
66 int main(){
67 int bx,by,mx,my;
68 cin>>bx>>by>>mx>>my;
69 memset(f,-1,sizeof(f));
70 f[0][0]=1;
71
72 //将马控制的点加入到f数组
73 for(int i=0;i<=8;i++){
74 int now_x=mx+hx[i];
75 int now_y=my+hy[i];
76 if(now_x>=0&&now_y>=0){
77 f[now_x][now_y]=0;
78 }
79 }
80
81 cout<<find(bx,by)<<endl;
82 return 0;
83 }
3、搜索解法取正
博客对应课程的视频位置:8.2、过河卒-搜索解法取正
https://www.fanrenyi.com/video/27/289
1 /*
2
3 递推表达式f[i][j]=f[i-1][j]+f[i][j-1]
4 需要 i-1 和 j-1,
5
6 int hx[9]={0,-2,-1,1,2,2,1,-1,-2};
7 int hy[9]={0,1,2,2,1,-1,-2,-2,-1};
8
9 而初始化马控制的点的时候会有 i-2, j-2 ,
10
11 所以我们可以 把整个图向右下移动2,
12 右下移2也就是把每个点的横纵坐标都加2
13 这样i-1、j-1、i-2、j-2都不会为负数了
14 这样就省了很多if判断,
15 而且这样对问题不会有任何影响
16
17
18 A是A点 , B是B点, M是马的位置, X是被马拦着不能走的点
19 A 0 0 0 0 0 0
20 0 0 X 0 X 0 0
21 0 X 0 0 0 X 0
22 0 0 0 M 0 0 0
23 0 X 0 0 0 X 0
24 0 0 X 0 X 0 0
25 0 0 0 0 0 0 B
26
27 取正后,也就是每个点都右下移2后
28 0 0 0 0 0 0 0 0 0
29 0 0 0 0 0 0 0 0 0
30 0 0 A 0 0 0 0 0 0
31 0 0 0 0 X 0 X 0 0
32 0 0 0 X 0 0 0 X 0
33 0 0 0 0 0 M 0 0 0
34 0 0 0 X 0 0 0 X 0
35 0 0 0 0 X 0 X 0 0
36 0 0 0 0 0 0 0 0 B
37
38
39 */
40
41 #include <iostream>
42 #include <cstring>
43 using namespace std;
44 int hx[9]={0,-2,-1,1,2,2,1,-1,-2};
45 int hy[9]={0,1,2,2,1,-1,-2,-2,-1};
46 long long f[25][25];
47 long long find(int x,int y){
48 //如果缓存里面有,就从缓存里面拿
49 //否则计算结果存入缓存
50 if(f[x][y]!=-1) return f[x][y];
51 else{
52 //f[i][j]=f[i-1][j]+f[i][j-1]
53 return f[x][y]=find(x-1,y)+find(x,y-1);
54 }
55 }
56
57 int main(){
58 int bx,by,mx,my;
59 cin>>bx>>by>>mx>>my;
60 bx+=2;by+=2;mx+=2;my+=2;
61 memset(f,-1,sizeof(f));
62 f[2][2]=1;
63 for(int i=1;i<=bx;i++) f[i][1]=0;
64 for(int i=1;i<=by;i++) f[1][i]=0;
65 //将马控制的点加入到f数组
66 for(int i=0;i<=8;i++){
67 f[mx+hx[i]][my+hy[i]]=0;
68 }
69
70 cout<<find(bx,by)<<endl;
71 return 0;
72 }
4、递推解法
博客对应课程的视频位置:8.3、过河卒-递推解法
https://www.fanrenyi.com/video/27/290
1 /* 2 3 状态: 4 如果设f[i][j]表示走到(i,j)点的路径总数 5 6 递推表达式(状态转移方程): 7 f[i][j]=f[i-1][j]+f[i][j-1] 8 9 初始状态: 10 f[0][0]=1 11 假设马控制的点的坐标为(mx,my),那么f[mx][my]始终为0 12 13 */ 14 #include <iostream> 15 #include <cstring> 16 using namespace std; 17 int hx[9]={0,-2,-1,1,2,2,1,-1,-2}; 18 int hy[9]={0,1,2,2,1,-1,-2,-2,-1}; 19 long long f[25][25]; 20 21 int main(){ 22 int bx,by,mx,my; 23 cin>>bx>>by>>mx>>my; 24 memset(f,-1,sizeof(f)); 25 f[0][0]=1; 26 27 //将马控制的点加入到f数组 28 for(int i=0;i<=8;i++){ 29 int now_x=mx+hx[i]; 30 int now_y=my+hy[i]; 31 if(now_x>=0&&now_y>=0){ 32 f[now_x][now_y]=0; 33 } 34 } 35 36 //做动态规划 37 for(int i=0;i<=bx;i++){ 38 for(int j=0;j<=by;j++){ 39 //if(i||j) 40 //动态规划填表的时候,对于能够填表的点才填表 41 //不能填表的点比如初始状态就不能动 42 if(f[i][j]==-1) 43 { 44 //f[i][j]=f[i-1][j]+f[i][j-1] 45 if(i-1>=0&&j-1>=0) f[i][j]=f[i-1][j]+f[i][j-1]; 46 else if(i-1>=0) f[i][j]=f[i-1][j]; 47 else if(j-1>=0) f[i][j]=f[i][j-1]; 48 else f[i][j]=0; 49 } 50 } 51 } 52 53 cout<<f[bx][by]<<endl; 54 return 0; 55 }