需要用到的一些知识和假设:
(1) 来源于 github中的讨论:
由于IMU累积推算位置的误差大,程序中粗略地计算了IMU的位置漂移。
_imuPositionShift = _imuCur.position - _imuStart.position - _imuStart.velocity * relSweepTime;
上式成立的前提是认为一个扫描周期内,Lidar的运动是匀速的,上式计算出了非线性误差部分。
(2) X、Y、Z轴对应俯仰(pitch)、航向(yaw)、横滚(roll)机动,可知Lidar坐标系为“右下前”坐标系。
(3) 从Lidar系到global IMU系,类似于惯导系统中的C(b->n),即载体系到地理系的转换。
旋转顺序为:横滚->俯仰->航向
rotateZXY(point, roll, pitch, yaw);
从global IMU系到Lidar系,旋转顺序正好相反。
rotateYXZ(point, -yaw, -pitch, -roll);
(4) transform代表将k时刻的点云转换到k+1时刻下,与视觉slam中的相对位姿定义相同。
坐标转换与IMU融合
1、 transformToStartIMU
注册点云时(MultiScanRegistration.cpp中),当判断有IMU数据时,会进行一步坐标转换的预处理,体现在函数transformToStartIMU中。
这个函数进行了三步处理:
(1) rotateZXY(point, _imuCur.roll, _imuCur.pitch, _imuCur.yaw);
将原始点云从当前Lidar系转换到global IMU系下;
(2) 补偿了_imuPositionShift,也即估算的IMU位置漂移;
(3) rotateYXZ(point, -_imuStart.yaw, -_imuStart.pitch, -_imuStart.roll);
将global IMU系下的点云转换到Start时刻的Lidar系下。
经过这个函数的处理,点云的position部分处于当前Lidar系下一个相对准确的位置上(基于扫描周期内匀速运动的假设),但点云的Rotation部分是Start时刻Lidar系下观察所得的,而非处于当前Lidar系下。更清晰地来说,即此时观察到的点云坐标,是以当前Lidar的坐标(一个估计值)为原点,而坐标轴是与Start时刻的Lidar系的坐标轴对齐的。
2、 OD初始化:
根据第一次开始扫描时的IMU pitch与roll,作为累积位姿的初始值。
_transformSum.rot_x += _imuPitchStart;
_transformSum.rot_z += _imuRollStart;
Yaw角度和pos部分都未赋初值,即假设开始时刻的偏航角为0,位于global系下的原点位置。
3、 运动估计初值:
(1) _transform.pos -= _imuVeloFromStart * _scanPeriod;
其中,imuVeloFromStart的计算,可知imuVeloFromStart为Start时刻Lidar系下的速度变化矢量:
imuVelocityFromStart = _imuCur.velocity - _imuStart.velocity;
rotateYXZ(imuVelocityFromStart, -_imuStart.yaw, -_imuStart.pitch, -_imuStart.roll);
对于匀速运动假设的一个补偿,并且基于运动曲线的连续性,做了递推形式的计算,可能乘以1/2会更合适?
(2) _transform的rotation部分未赋初值,认为为0。
4、 transformToStart
在进行KDTree最近点搜索前,首先将进行畸变处理后的点云转换到每一次扫描的开始时刻。
先根据匀速运动假设计算出当前点时刻Lidar的位移和旋转。
但这里其实是和前面的转换transformToStartIMU有些冲突的。因为transformToStartIMU之后点云所处的坐标轴是与Start时刻的Lidar系的坐标轴对齐的。现在又通过_transform将点云转换到start时刻。有一种转了两次的感觉。
有一种解释:认为k次扫描中的旋转部分大部分由IMU积分获得,_transform中的旋转估算的只是一个小量。
5、 transformToEnd
(1) 先进行transformToStart,此时点云处于start时刻的Lidar系下;
(2) 通过_transform转换到end时刻的Lidar系下;
(3) rotateZXY(point, _imuRollStart, _imuPitchStart, _imuYawStart);
转换到global系下
(4) rotateYXZ(point, -_imuYawEnd, -_imuPitchEnd, -_imuRollEnd);
转换到end时刻的Lidar系下。
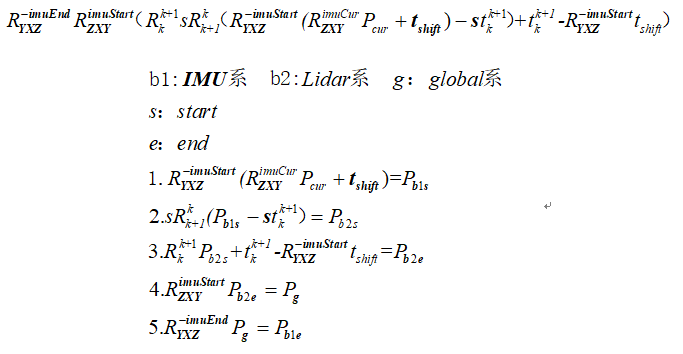
总结点云的旋转过程从1->5, 可用公式表示为:
6、accumulateRotation
该函数的作用是将计算的两帧之间的位姿“累加”起来,获得相对于第一帧的旋转矩阵,具体公式如下:
7、 pluginIMURotation
该函数与accumulateRotation,联合起来完成了更新_transformSum的rotation部分的工作。该函数可视为transformToEnd的下部分的逆过程。具体公式如下:
