一、下载数据集
wget -c http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
wget -c https://vision.in.tum.de/data/datasets/rgbd-dataset/download#freiburg1_desk
二、运行Euroc的MH_01_easy数据集和TUM的rgbd_dataset_freiburg1_desk数据集
1.Monocular程序运行Euroc数据集
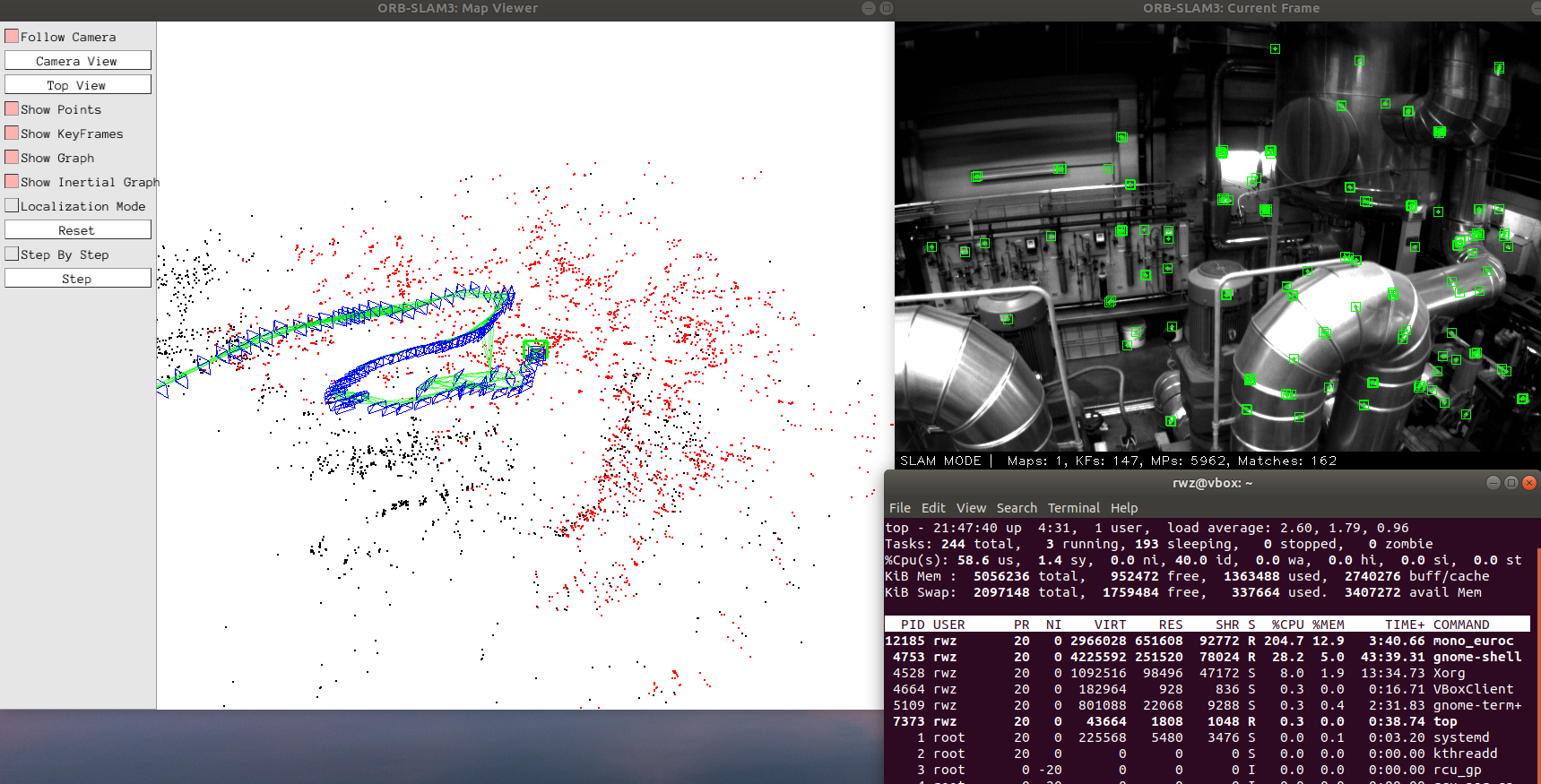
在ORBSLAM3目录输入命令(~/Dataset/MH01换成自身MH01所在目录):
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt
./Examples/Monocular/EuRoC.yaml ~/Dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
结果:
2.RGBD程序运行TUM数据集
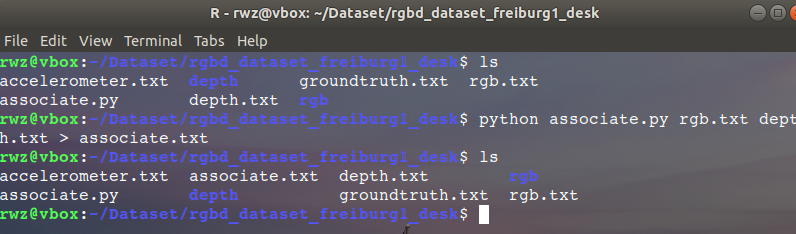
- 下载associate.py
- 在rgbd_dataset_freiburg1_desk目录下使用下列命令生成associate.txt对齐文件。
python associate.py rgb.txt depth.txt > associate.txt
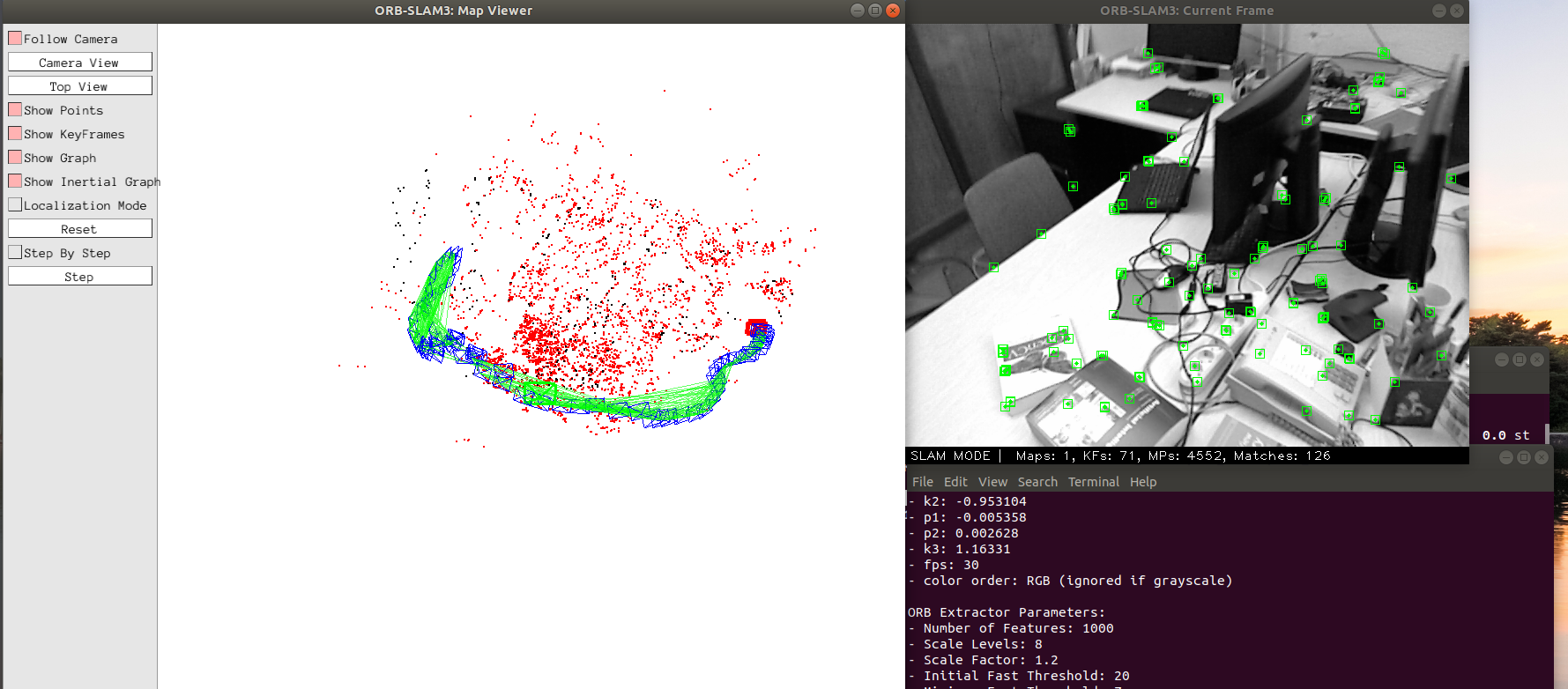
- 在ORBSLAM3目录输入命令(freiburg1所以配置文件使用TUM1.yaml):
./Examples/RGB-D/rgbd_tum ./Vocabulary/ORBvoc.txt ./Examples/RGB-D/TUM1.yaml ~/Dataset/rgbd_dataset_freiburg1_desk/ ~/Dataset/rgbd_dataset_freiburg1_desk/associate.txt
结果: